Tôi yêu Arduino gửi vào
- 9924 lượt xem
Hôm nay có vấn đề đụng đến attiny45 mà mình lại lười tải Arduino IDE 1.0.6 để lập trình cho dễ, thành ra quyết định dùng codebender để lập trình. Mình tìm trên cộng đồng mà không có bài nào nói về vấn đề này, nhưng lại có bài của ksp khá liên quan, chỉ cần chỉnh file boards.txt rồi up lên một tí là được. Nên mình quyết định viết bài cho anh em sau này gặp thì giải quyết cho dễ
Những hình ảnh về dự án:
Bài viết truyền cảm hứng:
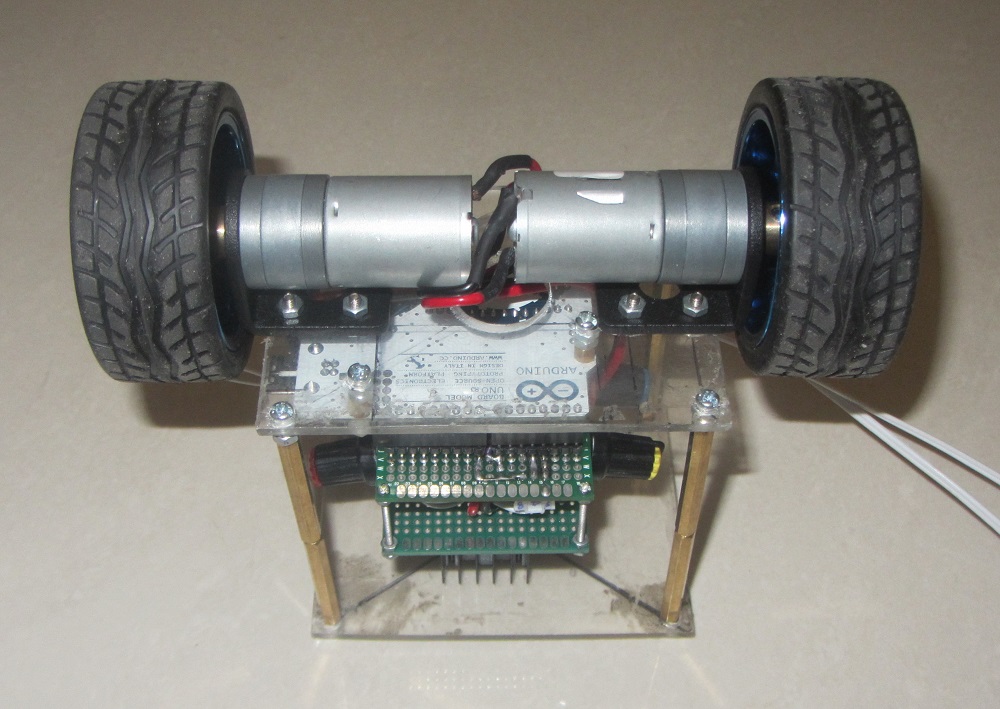
 . Để robot tự cân bằng trên hai bánh xe thì chuyển động của nó tương tự như việc giữ thăng bằng một cây gậy trên ngón tay. Điều này chắc các bạn cũng đã từng thử trước đây.
. Để robot tự cân bằng trên hai bánh xe thì chuyển động của nó tương tự như việc giữ thăng bằng một cây gậy trên ngón tay. Điều này chắc các bạn cũng đã từng thử trước đây.


Các bạn cứ theo bài viết Lập trình ATtiny13 với Codebender đến đoạn "Thử lại với file board.txt chỉ còn nội dung sau đây thử xem:"
Thay vì nhập đoạn mã trong bài viết đó, bạn hãy nhập đoạn mã sau của mình để lựa chọn chơi viết Attiny45 hoặc Attiny85 nhé.
Vì có rất nhiều mức xung nhiệp khác nhau có thể hoạt động được trên 2 board này, vì vậy bạn lựa chọn cho mình 2 cái phù hợp và paste vào file tên là boards.txt sau đó upload lên codebender nhé. Vì sao chỉ có 2 thôi? Vì Codebender cho chúng ta có 2 board personal thôi à, nhưng vậy là đủ lắm ù hehe.
Attiny45 @ 8MHz
Attiny45 @ 1MHz
Attiny85 @ 128KHz
Attiny25 @ 8MHz
Attiny25 @ 1MHz
Sau đó bạn hoàn toàn có thể tiếp tục theo bài của ksp để làm tiếp. Chúc bạn thành công