Đỗ Hữu Toàn gửi vào
- 51960 lượt xem
Giới thiệu
Trong những dự án Arduino, để dự án được nhỏ gọn và tiết kiệm, có nhiều bạn thường xử dụng board Arduino Pro Mini vì nó khá nhỏ gọn và giá thành thì max rẻ (khỏi nói - chỉ tẩm 50k). Nhưng Pro mini lại không có tích hợp mạch nguồn 3.3V và 5V, nên khó có thể cấp nguồn chuẩn 5V hay 3.3V cho các module hay cảm biến. Để giải quyết vấn đề đó, bài viết này mình sẽ giới thiệu về module hạ áp LM2596
Giới thiệu Module LM2596
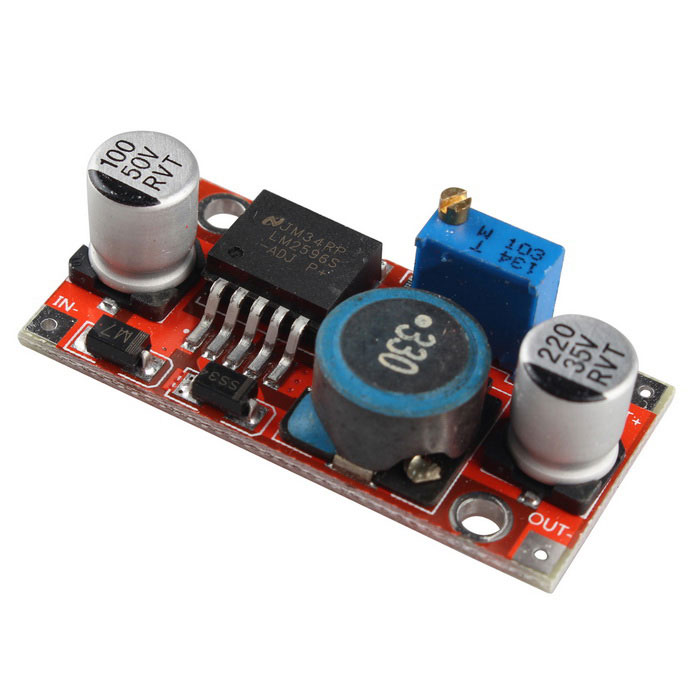
Mạch Giảm Áp LM2596 là module giảm áp có khả năng điều chỉnh được dòng ra đến 3A. LM2596 là IC nguồn tích hợp đầy đủ bên trong. Tức là khi cấp nguồn 9v vào module, sau khi giảm áp ta có thể lấp được nguồn 3A < 9v...như 5V hay 3.3V. Thật tuyệt vời đúng không?
Thông số kỹ thuật
- Module nguồn không sử dụng cách ly
- Nguồn đầu vào từ 4V - 35V.
- Nguồn đầu ra: 1V - 30V.
- Dòng ra Max: 3A
- Kích thước mạch: 53mm x 26mm
- Đầu vào: INPUT +, INPUT-
- Đầu ra: OUTPUT+, OUTPUT-

Cách sử dụng LM256
Khá đơn giản, các bạn chỉ cần cấp nguồn thô vào chân INPUT+, INPUT- rồi nhận nguồn ra từ chân OUTPUT+, OUTPUT-

Tý nữa thỳ quên, các bạn chỉnh điện áp đầu ra bằng cách vặn cái biến trở trên module...rồi lấy đồng hồ đo điện áp đầu ra, hiệu chỉnh sao cho phù hợp :v ( Nếu vặn biến trở mà đo vẫn không thấy thay đổi các bạn vặn thêm 10 vòng nữa hoặc vặn ngược lại nhé, bởi vì cái biến trở đó hỗ trợ vặn 14 vòng đó!!)
Lời kết
Chúc các bạn thành công, nếu thấy hay thì Rate Node cho mình nhé!