DucLe gửi vào
- 68971 lượt xem
LabVIEW là phần mềm trực quan và có ứng dụng rộng rãi trong công nghiệp. Trong khi Arduino đang nổi lên như là một hướng đi mới trong lĩnh vực điện tử, điều khiển tự động. Sự kết hợp giữa LabVIEW và Arduino giúp nhanh chóng thực hiện các ứng dụng thu thập dữ liệu và điều khiển thiết bị. Việc nghiên cứu về LabVIEW kết hợp với Arduino đang rất được quan tâm và hứa hẹn sẽ phát triển trong tương lai.
Những hình ảnh về dự án:
Bài viết truyền cảm hứng:
 . Hôm nay chúng ta sẽ đến với
. Hôm nay chúng ta sẽ đến với 

I.Giới thiệu
II. Hoạt động
Ngày 13/03/2012 ABB Robotics cho ra mắt PalletPack 460, gói tiền chế cuả các thành phần robot bốc xếp với robot IRB 460 được thiết kế đặc biệt cho chức năng bốc xếp đầu cuối dòng tốc độ cao. Tâm điểm của PalletPack là IRB 460, robot bốc xếp nhanh nhất được biết đến trên thị trường. IRB 460 bốn trục có tầm với 2.4 mét và công xuất nâng 110 kg, thiết kế nhỏ gọn khiến nó trở thành sản phẩm lý tưởng cho việc tích hợp vào các dây chuyển đóng gói sẵn có.
Robot tọa độ cầu 4 bậc của mình mô phỏng theo robot công nghiệp IRB 460 của hãng ABB , đã được thu nhỏ lại với 2 cánh tay đòn dài 160 mm, nặng khoảng 2kg và có thể nâng vật khoảng 250g.
Mô Phỏng hoạt động
Các khâu của robot thường thực hiện hai chuyển động cơ bản:
Chuyển động tịnh tiến theo hướng x,y,z trong không gian Descarde (Đề cát - không gian 3D), thông thường tạo nên các hình khối, các chuyển động nầy thường ký hiệu là T (Translation) hoặc P (Prismatic).
III. Nào cùng làm
1. Khung Robot
2. Hướng dẫn lắp ghép
Trong LINK DOWLOAD (xem mục lục phải) có file 3D các bạn down về xem cho rõ.
3. Lập trình
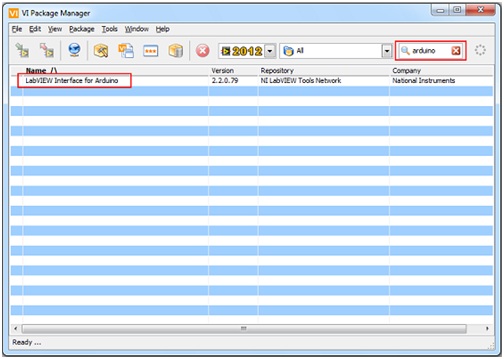
Cài đặt như sau
Để kết nối và làm việc với Arduino, trên LabVIEW cần có 1 bộ VIs của Arduino. Thông qua bộ VIs, LabVIEW có thể lấy dữ liệu từ các chân Arduino và xử lý, điều khiển hoặc hiển thị kết quả trên màn hình máy tính. Do sự phổ biến và chuẩn hóa của Arduino nên bộ VIs của nó đã được phổ biến rộng rãi không cần người sử dụng phải tự lập trình. Để sử dụng được ta thực hiện theo các bước sau:
LINK DOWLOAD
https://drive.google.com/drive/folders/0BxLzNXOK7POaNWRmZDVkNEVoaVk (mirror)
Chọn thư mục robot click phải chuột chọn tải xuống nhé !!!
Font Panel Điều Khiển:
GCODE:
Bạn có thể xem động học(Kinematics robotics) trong file báo cáo.
Xong hết rồi thì chiến thôi:
IV. Kết luận
Ưu điểm
Cánh tay được thiết kế khá đẹp mắt, nhỏ gọn phù hợp với đề tài đồ án cơ sở.
Nhược điểm
Dù đã cố gắn hết sức, nhưng vì thời gian làm đồ án có hạn nên phải dừng lại , việc điều khiển vẫn chưa được như ý muốn . Mình và những người thực hiện đồ án hi vọng, những khóa sau sẽ hoàn thiện nó , để nó có thể ứng dụng được.