Tôi yêu Arduino gửi vào
- 33003 lượt xem
Mình thấy cảm biến nhiệt độ LM35 rất rẻ và hoạt động cũng tương đối chính xác. Tuy nhiên, độ bền của nó không cao vì mình thấy mình chỉ dùng cảm biến LM35 trong khoảng thời gian 3 tháng, sau đó phải thay cảm biến khác (để đo nhiệt độ luộc gà). Bản thân mình không thích điều đó nên thử dùng một cảm biến khác cũng có chức năng tương tự là TMP36 và thấy nó hoạt động bền hơn (đã đến tháng thứ 4 nhưng chưa hư). Mình xin chia sẻ với các bạn nhé. Loại này hơi khó tìm và không thông dụng, nhưng nó bền hơn hẳn LM35 các bạn nhé.
Những hình ảnh về dự án:
Bài viết truyền cảm hứng:


I. Chuẩn bị
II. Giới thiệu về TMP36
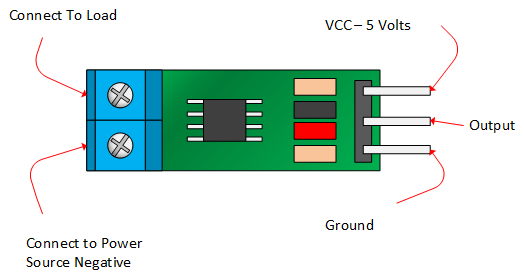
Cảm biến này nhìn qua thì chúng ta thấy giống như một transistor vậy. TMP36 sử dụng rất đơn giản, nếu nhìn thẳng vào mặt phẳng thì:
Cảm biến TMP 36 này xuất tín hiệu là tín hiệu điện áp, tín hiệu này tỷ lệ thuận với nhiệt độ. Cứ 10mV tương đương với 1 độ C, nó có thể đo được nhiệt độ từ -40 ==>125 độ C (hơn hẳn so với LM35 các bạn nhé). Bởi vì nó xuất một tín hiệu tương tự nên khi làm việc với Arduino chúng ta sử dụng hàm analogRead(). Khi Arduino làm việc nó sẽ trả tín hiệu tương tự này về giá trị từ 0-1023 tùy thuộc vào điện áp từ 0-5V(5000mV). Điện áp thực tế sẽ là điện áp mà Arduino đọc được sau đó nhân với (5000/1024). Sau đó chúng ta phải trừ đi điện áp bù 400 và chia cho 10 sẽ ra kết quả là độ C. Bây giờ chúng ta cùng ráp vào mạch nhé!
III. Ráp mạch nào
IV. Lập trình
#define SENSOR_PIN A0 float voltage = 0; // Thiết lập một số giá trị ban đầu float sensor = 0; float celsius = 0; float fahrenheit = 0; void setup() { Serial.begin(9600); // Bật serial monitor } void loop() { // Bắt đầu đo sensor = analogRead(SENSOR_PIN); voltage = (sensor*5000)/1024; // Chuyển đổi tín hiệu cảm biến sang mili Volt voltage = voltage-400; // Trừ đi điện áp bù celsius = voltage/10; // Chuyển đổi mV sang độ C fahrenheit = ((celsius * 1.8)+32); // Đổi độ C sang độ F Serial.print("Nhiet do: "); Serial.print(celsius,2); Serial.println(" do C"); Serial.print("Nhiet do: "); Serial.print(fahrenheit,2); Serial.println(" do F"); Serial.println("____"); delay (1000); // delay 1s để khổi trôi dư liệu }V. Lời kết
Chúc các bạn thành công!