ksp gửi vào
- 113328 lượt xem
Giới thiệu
Xuất tín hiệu ra các chân digital, có 2 giá trị là HIGH hoặc là LOW
Nếu một pin được thiết đặt là OUTPUT bởi pinMode(). Và bạn dùng digitalWrite để xuất tín hiệu thì điện thế tại chân này sẽ là 5V (hoặc là 3,3 V trên mạch 3,3 V) nếu được xuất tín hiệu là HIGH, và 0V nếu được xuất tín hiệu là LOW.
Nếu một pin được thiết đặt là INPUT bởi pinMode(). Lúc này digitalWrite sẽ bật (HIGH) hoặc tắt (LOW) hệ thống điện trở pullup nội bộ. Chúng tôi khuyên bạn nên dùng INPUT_PULLUP nếu muốn bật hệ thống điện trở pullup nội bộ.
Cú pháp
digitalWrite(pin,value)
Thông số
pin: Số của chân digital mà bạn muốn thiết đặt
Trả về
không
Ví dụ
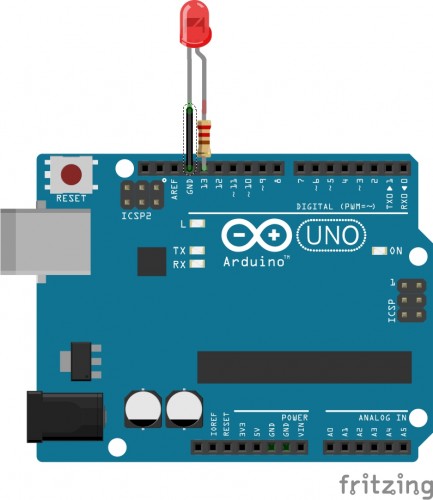
int ledPin = 13; // đèn LED được kết nối với chân digital 13
void setup()
{
pinMode(ledPin, OUTPUT); // thiết đặt chân ledPin là OUTPUT
}
void loop()
{
digitalWrite(ledPin, HIGH); // bật đèn led
delay(1000); // dừng trong 1 giây
digitalWrite(ledPin, LOW); // tắt đèn led
delay(1000); // dừng trong 1 giây
}