pitagoever gửi vào
- 47504 lượt xem
Bài này giới thiệu về xung PPM (Pulse Position Modulation) được sử dụng để điều khiển servo. Về bản chất PPM cũng là một xung, do vậy bạn cần tham khảo về xung trong bài xung PWM trước khi đọc tiếp nội dung của bài này.
Xung PPM khác với PWM ở chỗ:
- tần số thông thường có giá trị trong khoảng 50Hz (20 mili giây), không quan trọng
- thời gian xung ở mức cao chỉ từ 1ms đến 2ms, rất quan trọng.
- có thể có nhiều hơn 1 sự thay đổi trạng thái điện cao/thấp
Nắm bắt được 2 ý trên ta đã có thể phân biệt được xung PPM và xung PWM giống nhau và khác nhau như thế nào.
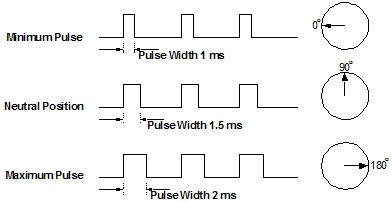
Thời gian xung ở mức cao quy định góc quay của RC servo.
Với thời gian 1ms mức cao, góc quay của servo là 0, 1.5ms góc quay 90 và 2ms góc quay là 180. Các góc khác từ 0-180 được xác định trong khoảng thời gian 1-2ms.
Lưu ý: có thể ghép nhiều xung trong cùng 1 thời gian là 20ms để xác định vị trí góc của nhiều servo cùng 1 lúc. Tối đa là 10 servo.
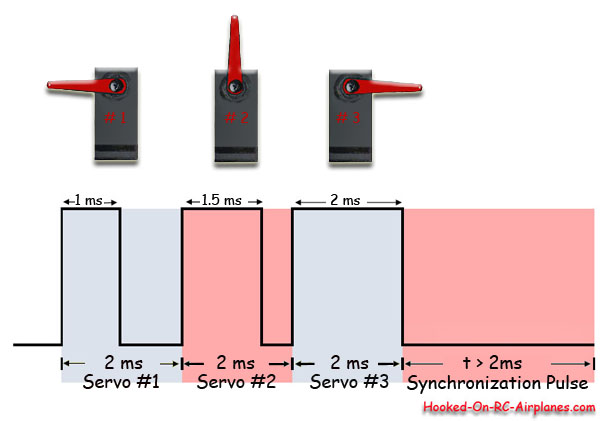
Điều khiển 3 servo cùng lúc


