tuenhi.n2012 gửi vào
- 87665 lượt xem
Hôm nay mình xin chia sẻ với các bạn cách làm một robot tự cân bằng trên hai bánh xe bằng Arduino từ xe đồ chơi bị hỏng của thằng nhóc ở nhà. Tất nhiên, hai động cơ và hai bánh xe chưa bị hỏng nhé.  . Để robot tự cân bằng trên hai bánh xe thì chuyển động của nó tương tự như việc giữ thăng bằng một cây gậy trên ngón tay. Điều này chắc các bạn cũng đã từng thử trước đây. Để giữ thăng bằng, chúng ta phải di chuyển ngón tay của mình nhanh hay chậm theo hướng nghiêng và tốc độ nghiêng của cây gậy. Chúng ta bắt đầu tìm hiểu xem làm thế nào mà Arduino có thể tự điều chỉnh được như thế.
. Để robot tự cân bằng trên hai bánh xe thì chuyển động của nó tương tự như việc giữ thăng bằng một cây gậy trên ngón tay. Điều này chắc các bạn cũng đã từng thử trước đây. Để giữ thăng bằng, chúng ta phải di chuyển ngón tay của mình nhanh hay chậm theo hướng nghiêng và tốc độ nghiêng của cây gậy. Chúng ta bắt đầu tìm hiểu xem làm thế nào mà Arduino có thể tự điều chỉnh được như thế.
Những hình ảnh về dự án:
Bài viết truyền cảm hứng:



I. DẪN NHẬP
Hôm nay mình xin chia sẻ với các bạn cách làm một robot tự cân bằng trên hai bánh xe bằng Arduino từ xe đồ chơi bị hỏng của thằng nhóc ở nhà. Tất nhiên, hai động cơ và hai bánh xe chưa bị hỏng nhé. . Để robot tự cân bằng trên hai bánh xe thì chuyển động của nó tương tự như việc giữ thăng bằng một cây gậy trên ngón tay. Điều này chắc các bạn cũng đã từng thử trước đây. Để giữ thăng bằng, chúng ta phải di chuyển ngón tay của mình nhanh hay chậm theo hướng nghiêng và tốc độ nghiêng của cây gậy. Chúng ta bắt đầu tìm hiểu xem làm thế nào mà Arduino có thể tự điều chỉnh được như thế.
. Để robot tự cân bằng trên hai bánh xe thì chuyển động của nó tương tự như việc giữ thăng bằng một cây gậy trên ngón tay. Điều này chắc các bạn cũng đã từng thử trước đây. Để giữ thăng bằng, chúng ta phải di chuyển ngón tay của mình nhanh hay chậm theo hướng nghiêng và tốc độ nghiêng của cây gậy. Chúng ta bắt đầu tìm hiểu xem làm thế nào mà Arduino có thể tự điều chỉnh được như thế.
II. B.O.M
Các vật tư cần thiết để làm một robot 2 bánh tự cân bằng như sau:
No.
Item
Spec
Q'ty
Unit
Remarks
1
Arduino Uno
1
pcs
2
MPU-6050
1
pcs
3
L298
1
pcs
4
DC Motor
2
pcs
5
Bánh xe
60mm
2
pcs
6
Biến trở
5Kohm
pcs
7
PCB đục lỗ
4x6 cm, màu xanh, hai mặt
2
pcs
8
Trụ đồng
8
pcs
9
Nguồn 5V & 12V
1
pcs
10
Bus 4
1
pcs
11
Mica trong/đục
Dày 5mm
1
pcs
Làm khung
12
Dây – jack nguồn/ hàng rào
1
pcs
III. CHUẨN BỊ
Trước tiên, chúng ta phải bỏ một ít thời gian để tìm hiểu các thông tin cơ bản sau đây trước khi tiến hành làm một robot tự cân bằng.
3.1. Nguyên tắc con lắc ngược (inverted pendulum)
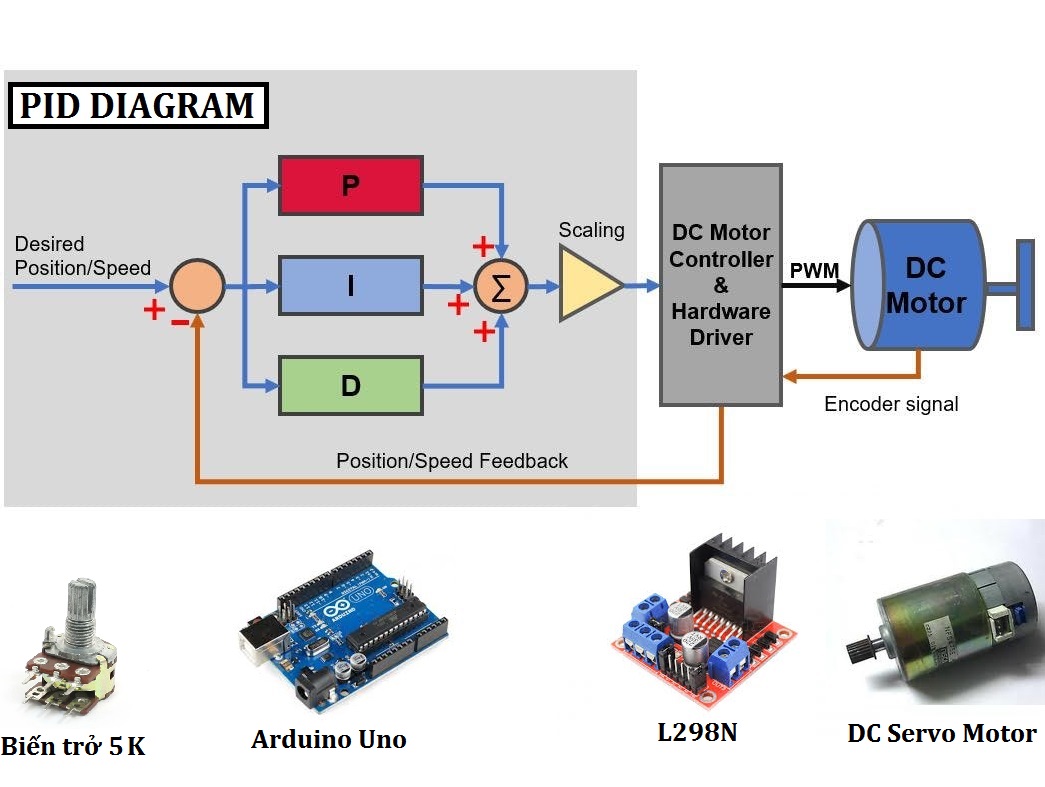
3.2. Điều khiển vòng kín P.I.D
3.3. MPU-6050
Xin phép tác giả trích lược lại như sau:
Một máy bay có thể thực hiện bao nhiêu kiểu chuyển động. Các loại chuyển động đó xảy ra xung quanh những trục nào?
Một máy bay có thể thực hiện 3 kiểu chuyển động. Nó có thể gọi pitch, roll và yaw.
Roll là kiểu chuyển động khi một trong hai cánh của máy bay liệng xuống còn cánh còn lại thì liệng lên. Ví dụ, nếu máy bay đang roll sang bên trái thì cánh trái sẽ liệng xuống còn cánh phải thì liệng lên. Chuyển động roll diễn ra xung quanh trục dọc thân máy bay.
Yaw là kiểu chuyển động khi mũi của máy bay di chuyển qua phải hoặc qua trái. Chuyển động yaw diễn ra xung quanh trục thẳng đứng, vuông góc với thân máy bay.
IV. SƠ ĐỒ MẠCH VÀ KHUNG ROBOT
4.1. Phần cứng và khung robot
4.2. Sơ đồ hiệu chỉnh P, I, D bằng chương trình
Với sơ đồ này, các bạn phải tìm các thông số P, I, D bằng các phép thử và theo mình sẽ mất nhiều thời gian. Nhưng Arduino sẽ còn nhiều chân Analog để có thể làm việc khác. Một cách khác là điều chỉnh P, I, D qua Serial nhưng nó sẽ không hiệu quả lắm do Arduino thường xuyên bị treo (pending/ freezing). Qua tìm hiểu, mình thấy có rất nhiều người trên các diễn đàn than phiền về vấn đề này nhưng vẫn chưa có cách giải quyết....
4.3. Sơ đồ hiệu chỉnh P.I.D qua biến trở
Với việc có thêm các biến trở để hiệu chỉnh các hệ số P, I, D sẽ làm giảm rất nhiều thời gian mò mẫm các hệ số này sao cho robot hoạt động ổn định, mượt mà. Các hệ số P, I và D được tìm như sau:
Với robot của mình, các thông số PID tìm được là:
V. THƯ VIỆN VÀ CHƯƠNG TRÌNH
5.1. Chương trình chính
Chương trình chính và việc áp dụng các thư viện được tham khảo từ nhiều nguồn khác nhau, trang tham khảo chính: https://github.com/lukagabric/Franko
#include "PID_v1.h" #include "LMotorController.h" #include "I2Cdev.h" #include "MPU6050_6Axis_MotionApps20.h" #if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE #include "Wire.h" #endif #define LOG_INPUT 0 #define MANUAL_TUNING 1 #define LOG_PID_CONSTANTS 1 //MANUAL_TUNING must be 1 #define MOVE_BACK_FORTH 0 #define MIN_ABS_SPEED 5 //MPU MPU6050 mpu; // MPU control/status vars bool dmpReady = false; // set true if DMP init was successful uint8_t mpuIntStatus; // holds actual interrupt status byte from MPU uint8_t devStatus; // return status after each device operation (0 = success, !0 = error) uint16_t packetSize; // expected DMP packet size (default is 42 bytes) uint16_t fifoCount; // count of all bytes currently in FIFO uint8_t fifoBuffer[64]; // FIFO storage buffer // orientation/motion vars Quaternion q; // [w, x, y, z] quaternion container VectorFloat gravity; // [x, y, z] gravity vector float ypr[3]; // [yaw, pitch, roll] yaw/pitch/roll container and gravity vector //PID #if MANUAL_TUNING double kp , ki, kd; double prevKp, prevKi, prevKd; #endif double originalSetpoint = 178.70;// 181.13 double setpoint = originalSetpoint; double movingAngleOffset = 0.15;// 0.3- OK, 0.15 - OK double input, output; int moveState=0; //0 = balance; 1 = back; 2 = forth #if MANUAL_TUNING PID pid(&input, &output, &setpoint, 0, 0, 0, DIRECT); #else PID pid(&input, &output, &setpoint, 10.50, 67.44, 0.88, DIRECT);// time 5ms & 10ms, sometimes Kp(17.35, 16.86) Ki(302.05, 301.05) Kd(1.21) #endif //MOTOR CONTROLLER int ENA = 3; int IN1 = 4; int IN2 = 8; int IN3 = 5; int IN4 = 7; int ENB = 6; LMotorController motorController(ENA, IN1, IN2, ENB, IN3, IN4, 1, 1); //timers long time1Hz = 0; long time5Hz = 0; volatile bool mpuInterrupt = false; // indicates whether MPU interrupt pin has gone high void dmpDataReady() { mpuInterrupt = true; } void setup() { // join I2C bus (I2Cdev library doesn't do this automatically) #if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE Wire.begin(); TWBR = 24; // 400kHz I2C clock (200kHz if CPU is 8MHz) #elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE Fastwire::setup(400, true); #endif // initialize serial communication // (115200 chosen because it is required for Teapot Demo output, but it's // really up to you depending on your project) Serial.begin(115200); while (!Serial); // wait for Leonardo enumeration, others continue immediately // initialize device Serial.println(F("Initializing I2C devices...")); mpu.initialize(); // verify connection Serial.println(F("Testing device connections...")); Serial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed")); // load and configure the DMP Serial.println(F("Initializing DMP...")); devStatus = mpu.dmpInitialize(); // supply your own gyro offsets here, scaled for min sensitivity mpu.setXGyroOffset(39); mpu.setYGyroOffset(14); mpu.setZGyroOffset(6); mpu.setZAccelOffset(1788); // 1688 factory default for my test chip // make sure it worked (returns 0 if so) if (devStatus == 0) { // turn on the DMP, now that it's ready Serial.println(F("Enabling DMP...")); mpu.setDMPEnabled(true); // enable Arduino interrupt detection Serial.println(F("Enabling interrupt detection (Arduino external interrupt 0)...")); attachInterrupt(0, dmpDataReady, RISING); mpuIntStatus = mpu.getIntStatus(); // set our DMP Ready flag so the main loop() function knows it's okay to use it Serial.println(F("DMP ready! Waiting for first interrupt...")); dmpReady = true; // get expected DMP packet size for later comparison packetSize = mpu.dmpGetFIFOPacketSize(); //setup PID pid.SetMode(AUTOMATIC); pid.SetSampleTime(5);// 10 - OK, 5 - GOOD, 1- CHANGE PID pid.SetOutputLimits(-255, 255);// 80 - OK Strong enough } else { // ERROR! // 1 = initial memory load failed // 2 = DMP configuration updates failed // (if it's going to break, usually the code will be 1) Serial.print(F("DMP Initialization failed (code ")); Serial.print(devStatus); Serial.println(F(")")); } } void loop() { // if programming failed, don't try to do anything if (!dmpReady) return; // wait for MPU interrupt or extra packet(s) available while (!mpuInterrupt && fifoCount < packetSize) { //no mpu data - performing PID calculations and output to motors pid.Compute(); motorController.move(output, MIN_ABS_SPEED); unsigned long currentMillis = millis(); if (currentMillis - time1Hz >= 1000) { loopAt1Hz(); time1Hz = currentMillis; } if (currentMillis - time5Hz >= 5000) { loopAt5Hz(); time5Hz = currentMillis; } } // reset interrupt flag and get INT_STATUS byte mpuInterrupt = false; mpuIntStatus = mpu.getIntStatus(); // get current FIFO count fifoCount = mpu.getFIFOCount(); // check for overflow (this should never happen unless our code is too inefficient) if ((mpuIntStatus & 0x10) || fifoCount == 1024) { // reset so we can continue cleanly mpu.resetFIFO(); Serial.println(F("FIFO overflow!")); // otherwise, check for DMP data ready interrupt (this should happen frequently) } else if (mpuIntStatus & 0x02) { // wait for correct available data length, should be a VERY short wait while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount(); // read a packet from FIFO mpu.getFIFOBytes(fifoBuffer, packetSize); // track FIFO count here in case there is > 1 packet available // (this lets us immediately read more without waiting for an interrupt) fifoCount -= packetSize; mpu.dmpGetQuaternion(&q, fifoBuffer); mpu.dmpGetGravity(&gravity, &q); mpu.dmpGetYawPitchRoll(ypr, &q, &gravity); #if LOG_INPUT Serial.print("ypr\t"); Serial.print(ypr[0] * 180/M_PI); Serial.print("\t"); Serial.print(ypr[1] * 180/M_PI); Serial.print("\t"); Serial.println(ypr[2] * 180/M_PI); #endif input = ypr[1] * 180/M_PI + 180; } } void loopAt1Hz() { #if MANUAL_TUNING setPIDTuningValues(); #endif } void loopAt5Hz() { #if MOVE_BACK_FORTH moveBackForth(); #endif } //move back and forth void moveBackForth() { moveState++; if (moveState > 2) moveState = 0; if (moveState == 0) setpoint = originalSetpoint; else if (moveState == 1) setpoint = originalSetpoint - movingAngleOffset; else setpoint = originalSetpoint + movingAngleOffset; } //PID Tuning (3 potentiometers) #if MANUAL_TUNING void setPIDTuningValues() { readPIDTuningValues(); if (kp != prevKp || ki != prevKi || kd != prevKd) { #if LOG_PID_CONSTANTS Serial.print(kp);Serial.print(", ");Serial.print(ki);Serial.print(", ");Serial.println(kd); #endif pid.SetTunings(kp, ki, kd); prevKp = kp; prevKi = ki; prevKd = kd; } } void readPIDTuningValues() { int potKp = analogRead(A0); int potKi = analogRead(A1); int potKd = analogRead(A2); kp = map(potKp, 0, 1023, 0, 25000) / 100.0; //0 - 250 ki = map(potKi, 0, 1023, 0, 100000) / 100.0; //0 - 1000 kd = map(potKd, 0, 1023, 0, 500) / 100.0; //0 - 5 } #endif5.2. Các thư viện cho dự án
Các bạn phải inlcude các thư viện sau vào chương trình chính:
V. LỜI KẾT
MERRY CHRISTMAS 2017 - CHÚC CỘNG ĐỒNG ARDUINO VIỆT NAM NGÀY CÀNG PHÁT TRIỂN.