loc4atnt gửi vào
- 24216 lượt xem
Xin chào các bạn, hôm nay chúng ta sẽ cùng tìm hiểu về một phương pháp giúp tiết kiệm năng lượng của nguồn công suất cho L298. Chúng ta sẽ cho bật nguồn công suất khi ta cho lệnh motor chạy.
Phần cứng
Trước tiên chúng ta sẽ tháo cái Jumb mình đã khoanh tròn ở dưới.
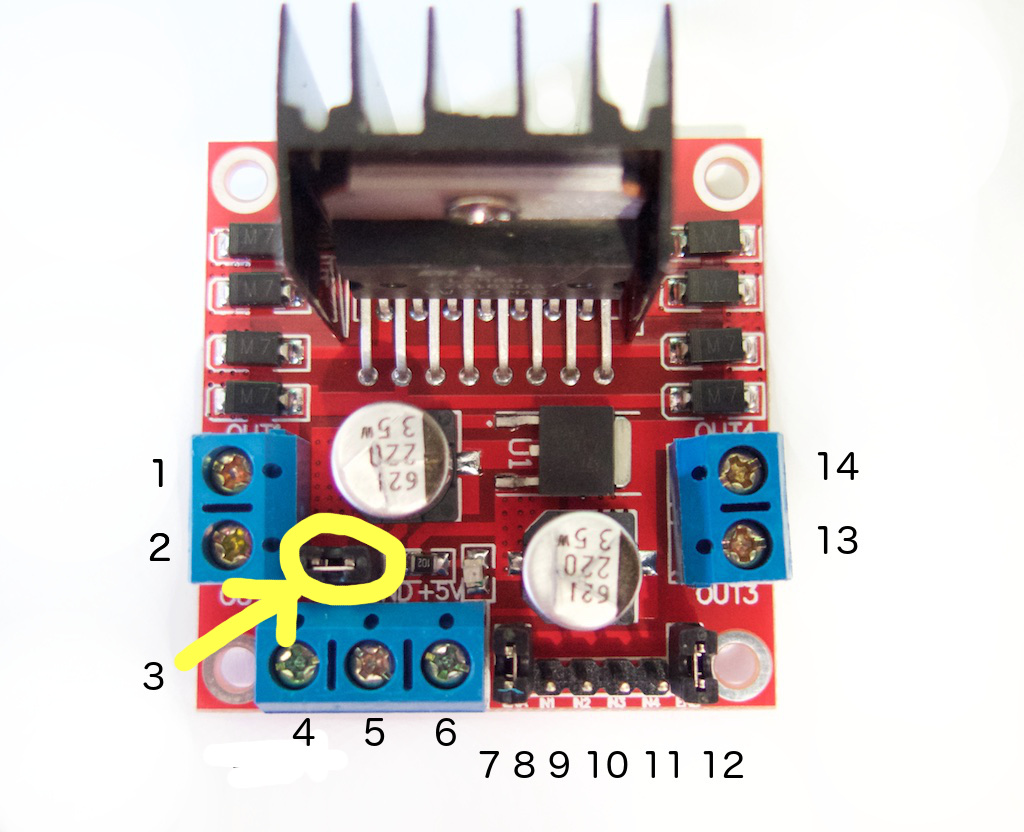
Sau khi tháo ra, ta sẽ thấy có 2 chân, ta sẽ nối chân bên phải với 1 pin của arduino(Mình nối chân 5). Nếu ta cho chân 5 điện áp cao thì sẽ bật nguồn công suất, cho điện áp thấp thì sẽ tắt nguồn công suất.
Phần mềm (Code)
Mình sử dụng thư viện RobotMove
#include <RobotMove.h>
RobotMove myRobot(6,7,8,9,0,0);
void setup()
{
pinMode(5,OUTPUT);
}
void loop()
{
digitalWrite(5,1);
myRobot.tien();
delay(2000);
myRobot.dung();
digitalWrite(5,0);
delay(2000);
}Kết luận
Mình hi vọng với thủ thuật vừa rồi sẽ giúp các bạn tiết kiệm được phần nào năng lượng của nguồn công suất module L298. Xin cảm ơn đã theo dõi.
Chuyên mục: