NDT gửi vào
- 30500 lượt xem
Hôm nay mình sẽ giới thiệu cho các bạn một cách nhận dạng hình ảnh mới nhất và đang hot hiện nay trên máy tính :) đó chính là YOLO (You only look once) YOLO là một hệ thống phát hiện vật thể thời gian thực hiện đại nhất, bộ dữ liệu đa dạng cho phép chúng ta làm các dự án liên quan như: đếm số người trong một khu vực, nhận dạng đông vật nuôi, đếm số phương tiện giao thông...
Ở bài này chúng ta sẽ chạy thử nghiệm nó trên Raspberry Pi cho các dự án nhận dạng ảnh đơn giản và không yêu cầu về mặt thời gian :) vì YOLO chủ yếu dùng cho các hệ thống máy tính mạnh, cấu hình cao . Hãy thử build nó lên Raspberry xem sao nhé ;)
Các thiết bị cần thiết
- Raspberry Pi 3 (hay một bản khác)
- Thẻ nhớ Micro SD (thấp nhất 4GB và đã cài hệ điều hành Raspbian, chọn vào đây để xem cách cài hệ điều hành Raspbian cho Pi)
Tải thư viện và cài đặt YOLO
Bạn thực hiện các lệnh sau để cài đặt Darknet trước nhé:
-
git clone https://github.com/pjreddie/darknet cd darknet make
- Tiếp theo bạn tiến hành tải bộ dữ liệu của YOLO :)
wget https://pjreddie.com/media/files/yolo.weights
Nhận dạng thử nghiệm một mẫu hình với YOLO
- Bạn chạy các lệnh sau để detect một hình ảnh sẵn có trong tập dữ liệu nhé, ở đây mình sẽ thử nghiệm với file hình có tên dog.jpg trong thư mục darknet/data :)
./darknet detect cfg/yolo.cfg yolo.weights data/dog.jpg
- Phân tích kết quả nhận được
-
layer filters size input output 0 conv 32 3 x 3 / 1 416 x 416 x 3 -> 416 x 416 x 32 1 max 2 x 2 / 2 416 x 416 x 32 -> 208 x 208 x 32 ....... 29 conv 425 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 425 30 detection Loading weights from yolo.weights...Done! data/dog.jpg: Predicted in 157.628 seconds. car: 54% bicycle: 51% dog: 56%
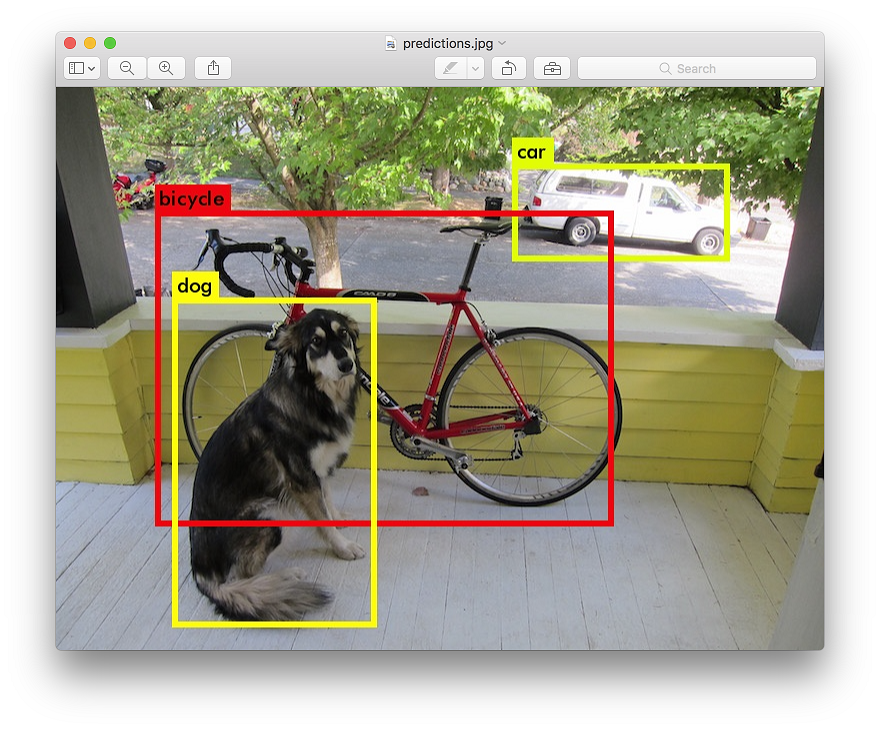
Ở trên chúng ta thấy được kết quả nhận dạng từ file hình trong vòng 157.628 giây, các kết quả bao gồm car: 54%, bicycle 51%, dog: 56% :) tuy thời gian mất đến hơn 2 phút nhưng kết quả cho ra thật chính xác, bạn có thể xem kết quả hình ảnh bên trên. Vì chúng ta đang sử dụng Raspberry Pi 3 để chạy Yolo nên các yêu cầu về phần cứng chưa đáp ứng đủ, dẫn đến thời gian xử lý rất lớn, đối với laptop hay máy để bàn có card màn hình thì thời gian này chỉ trong vòng 0.00xx giây mà thôi, Tuy thời gian có cao nhưng các project không yêu cầu tốc độ chẳng hạn " đếm số xe trong nhà xe" chẳng hạn :) thì nó trở nên dễ dàng và hữu ích
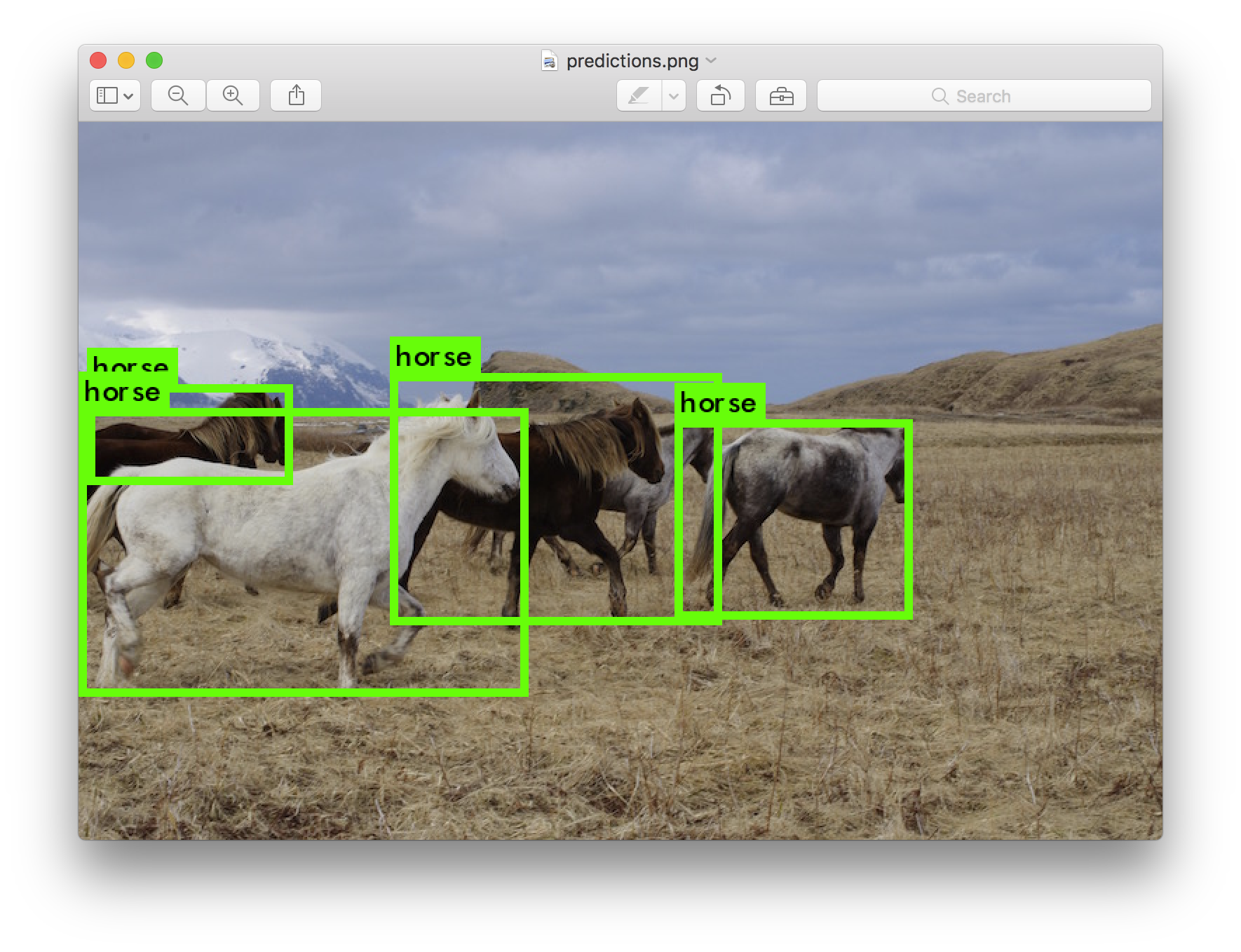
Hãy đổi tên và thử với một hình ảnh khác ví dụ những con ngựa nhé :)
./darknet detect cfg/yolo.cfg yolo.weights data/horse.jpg
Kết quả thu được tương tự :)
Sử dụng một file hình của bạn tùy ý
Để có thể xử lý một hình ảnh bất kì bạn chỉ việc chạy một số lệnh cơ bản để thay đổi đường dẫn ví dụ mình có một file hình là ndt.jpg trong đường dẫn home/ndt/Downloads thì bạn chỉ đổi phía sau đoạn code là được
./darknet detect cfg/yolo.cfg yolo.weights /home/ndt/Downloads/ndt.jpg
Kết quả thu được :)

Bạn có thể thấy được nó nhận dạng được mình và cả một người nhỏ nhỏ nằm trong hình ở trên tường :) thật vi diệu phải không nào :) Hôm sau chúng ta sẽ cùng nhau sử dụng Raspberry và camera để đếm số người trong một khu vực nhé :) hy vọng các bạn thấy vui với tools mới này :)





{kind=link}
{kind=link}