votandat gửi vào
- 10277 lượt xem
Mô tả dự án:
Giám sát 1 thanh ghi (16 input), 1 thanh ghi (16 output)
NẠP CODE BẰNG GX DEVALOPER



- Ở đây mình sẽ dùng K4 để nén 16 bit vào 1 thanh ghi, ở đây không có cổng X008 X009 nên sẽ bỏ qua chuyển tới X010 ...
LẬP TRÌNH TRÊN MÀN HÌNH HMI WEINTEK
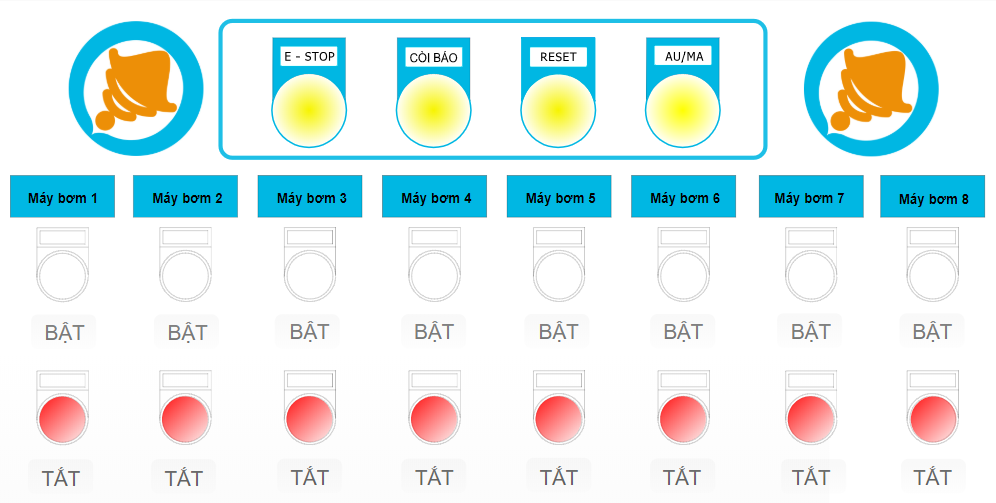
- Ở đây chỉ là giám sát nên mình chỉ cần hiển thị trạng thái của các thanh ghi này là được, vì X và Y được đồng bộ nhau nên ta chỉ cần hiển thị thanh ghi Y là được
- Như các bài trước mình sẽ dùng Bit Lamp để hiển thị trạng thái các thanh ghi (làm 16 Bit Lamp để hiển thị)

- Bạn có thể tùy chỉnh hiển thị khác bằng cách

- Kết quả

Tải về toàn bộ project tại đây
Chuyên mục: