loc4atnt gửi vào
- 150287 lượt xem
Giới thiệu
Xin chào mọi người, hôm trước mình đã có 1 bài viết hướng dẫn điều khiển motor brushless không chổi than. Nhưng mình chưa nói rõ là motor brushless là gì.Vì vậy bài viết này sẽ giới thiệu về motor này cho các bạn được biết thêm.Vào vấn đề luôn.
Động cơ BLDC (Brushless DC) mặc dù có tên là “một chiều không chổi than” nhưng nó thuộc nhóm động cơ đồng bộ nam châm vĩnh cửu chứ không phải là động cơ một chiều. Ta sẽ nói lý do tại sao nó có tên như vậy ở phần sau.
Động cơ đồng bộ nam châm vĩnh cửu là nhóm động cơ xoay chiều đồng bộ (tức là rotor quay cùng tốc độ với từ trường quay) có phần cảm là nam châm vĩnh cửu. Dựa vào dạng sóng sức phản điện động stator của động cơ mà trong nhóm này ta có thể chia thành 2 loại: -Động cơ (sóng) hình sin -Động cơ (sóng) hình thang
Động cơ BLDC là loại động cơ sóng hình thang, những động cơ còn lại là động cơ sóng hình sin (ta gọi chung với tên là PM – Permanent magnet Motor). Chính cái sức phản điện động có dạng hình thang này mới là yếu tố quyết định để xác định một động cơ BLDC chứ không phải các yếu tố khác như Hall sensor, bộ chuyển mạch điện tử (Electronic Commutator), .v.v. Như nhiều người vẫn nghĩ.
Cấu tạo của động cơ BLDC
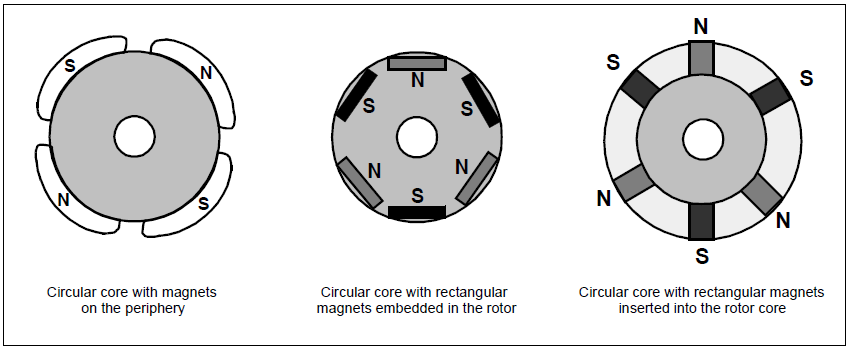
-Stator: bao gồm lõi sắt (các lá thép kĩ thuật điện ghép cách điện với nhau) và dây quấn. Cách quấn dây của BLDC khác so với cách quấn dây động cơ xoay chiều 3 pha thông thường, sự khác biệt này tạo nên sức phản điện động dạng hình thang mà ta thấy. Nếu không quan tâm tới vấn đề thiết kế, chế tạo động cơ, ta có thể bỏ qua sự phức tạp này.
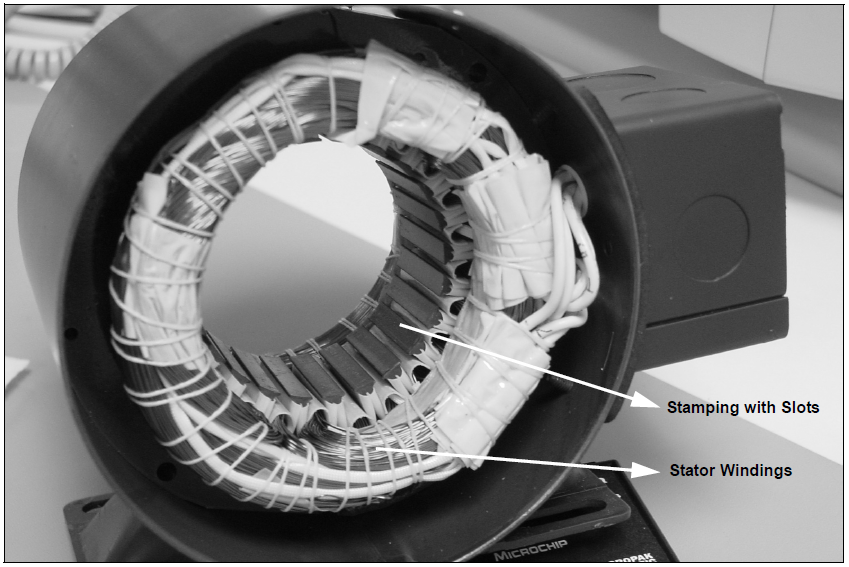
Hình 2: Stator động cơ BLDC
-Rotor: Về cơ bản là không có gì khác so với các động cơ nam châm vĩnh cửu khác.
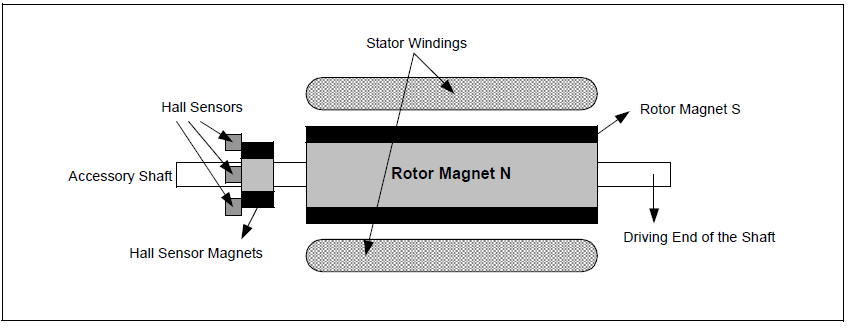
-Hall sensor: do đặc thù sức phản điện động có dạng hình thang nên cấu hình điều khiển thông thường của BLDC cần có cảm biến xác định vị trí của từ trường rotor so với các pha của cuộn dây stator. Để làm được điều đó người ta dùng cảm biến hiệu ứng Hall, gọi tắt là Hall sensor.
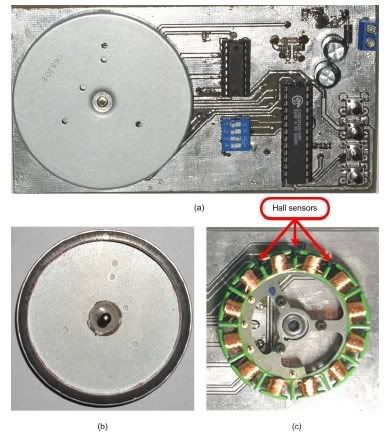
Hình 5: Hall sensor gắn trên stator
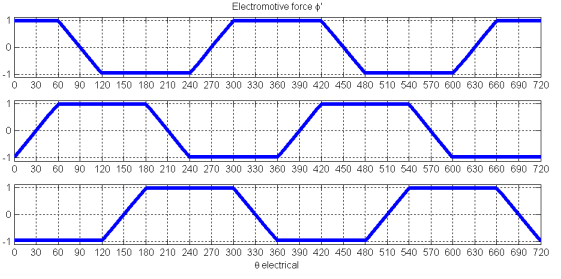
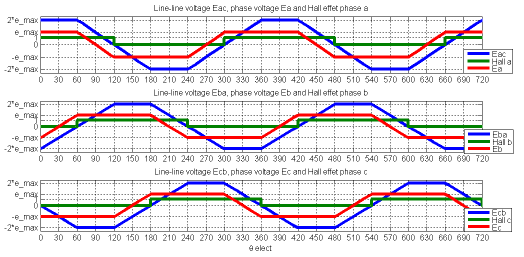
Dạng sóng sức phản điện động pha, dây và tín hiệu đưa về từ Hall sensor:
Điều khiển động cơ BLDC
Phương pháp điều khiển truyền thống động cơ BLDC là đóng cắt các khóa mạch lực (IGBT hoặc MOSFET) để cấp dòng điện vào cuộn dây stator động cơ dựa theo tín hiệu Hall sensor đưa về.
Sơ đồ nguyên lý mạch lực và động cơ như sau:
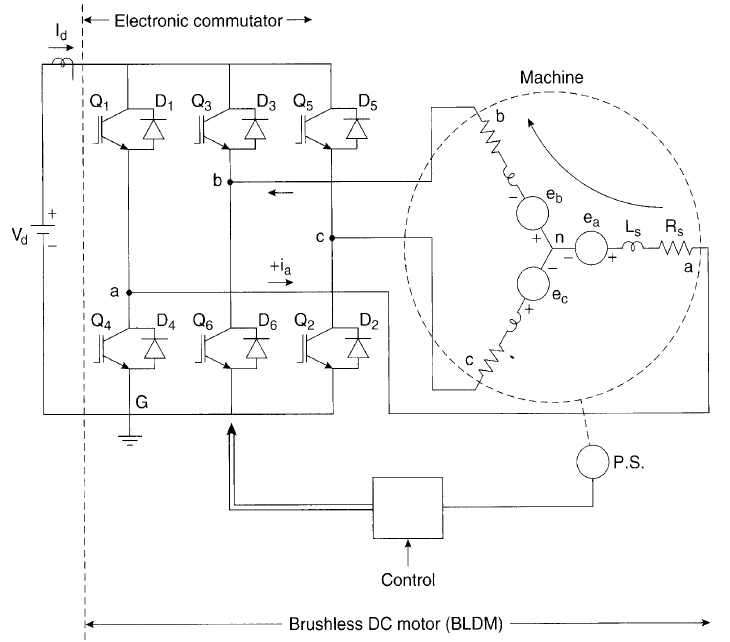
Hình 9: Nguyên tắc điều khiển truyền thống động cơ BLDC
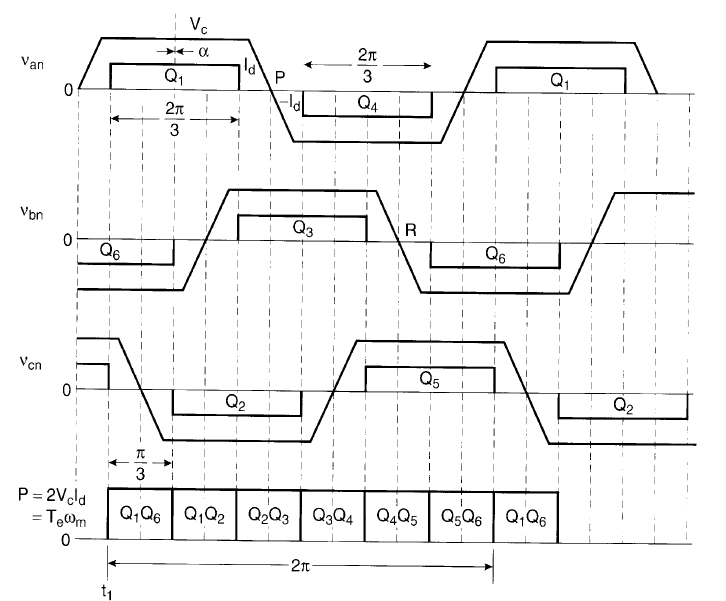
Chế độ điều khiển này gọi là chế độ điều khiển 120o. Đây là chế độ điều khiển cơ bản của BLDC, các chế độ khác tạm thời chưa xét đến.
Ta thấy rằng, trong một thời điểm bất kì luôn luôn chỉ có 2 pha dẫn điện, do đó ta còn gọi đây là chế độ điều khiển 2 pha dẫn. Chế độ khác (3 pha dẫn) cũng chưa xét ở đây.
Dưới mỗi pha dẫn ta thấy đều có dòng điện 1 chiều và sức điện động 1 chiều, do đó động cơ BLDC có đặc tính cơ và đặc tính điều khiển giống với động cơ 1 chiều. Chính vì thế mà động cơ này có tên gọi là “động cơ một chiều không chổi than” chứ thực ra nó là động cơ xoay chiều đồng bộ nam châm vĩnh cửu.
Ta xem trước hình ảnh một kết quả mô phỏng (sẽ trình bày mô phỏng ở phần sau) để thấy rõ hơn điều vừa nói:

Trên hình vẽ là quá trình khởi động, chạy không tải và sau khi đóng tải của động cơ BLDC. Ta thấy rõ ràng các pha (với các màu khác nhau) thay nhau dẫn và tính chất “một chiều” của chúng.
Để thực hiện nguyên lý điều khiển trên, cấu hình điều khiển dải trễ dòng điện (Hysteresis Current Control – HCC) được thực hiện và đó là cấu hình điều khiển kinh điển cho động cơ BLDC.
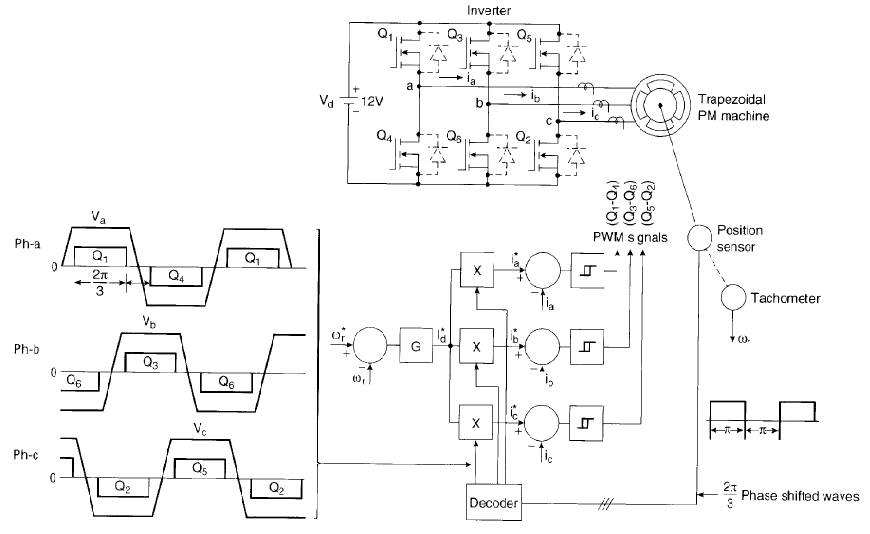
Vòng điều khiển tốc độ ở ngoài giống với động cơ một chiều. Sai số giữa tốc độ đặt và tốc độ thực được đưa vào bộ điều chỉnh tốc độ G, đầu ra của bộ điều chỉnh G là lượng đặt dòng điện Id*.
Tín hiệu Hall sensor đưa về được giải mã thành thông tin về dòng điện yêu cầu ở 3 pha Ia, Ib, Ic được kết hợp với giá trị dòng Id* qua khâu logic và đưa ra các lượng đặt dòng điện Ia*, Ib*, Ic*.
Ba khâu relay 2 trạng thái được sử dụng để đóng cắt các khóa mạch lực nhằm bơm các dòng điện này vào động cơ – phương pháp điều khiển dải trễ dòng điện.
Dòng điện trong các pha có dạng như sau:

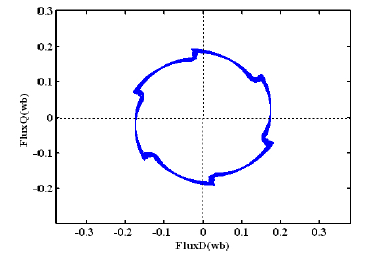
Dễ nhận thấy rằng với phương pháp điều chỉnh dòng HCC, dòng điện chuyển mạch 6 lần trong 1 chu kì. Sự chuyển mạch không lý tưởng (không tức thời, thời gian lên và xuống không bằng nhau) gây nên những hạn chế của động cơ BLDC: -Nhấp nhô moment -Quỹ đạo từ thông không tròn, khó xác định
Nhấp nhô moment (torque ripple) là điểm yếu của động cơ BLDC, một số lượng lớn các nghiên cứu về động cơ BLDC là làm sao giảm được sự nhấp nhô này.
Thông thường, quỹ đạo từ thông của động cơ phải có hình tròn, nhưng do sự chuyển mạch không lý tưởng của dòng điện nên quỹ đạo từ thông của động cơ BLDC có 6 “gai”, “bậc” trong 1 chu kì. Việc ước lượng từ thông tại các “bậc” đó là rất khó khăn, do đó rất khó điều khiển từ thông động cơ BLDC. Việc điều khiển động cơ BLDC cho đến nay đều bỏ qua việc điều khiển từ thông của nó.