loc4atnt gửi vào
- 17472 lượt xem
Chào mọi người! Mấy bữa nay bận quá không có thời gian viết bài, hôm nay rãnh rỗi nên viết bài này cho mọi người cùng đọc hihi :)). Qua bài viết Giới thiệu về các loại hộp số (bộ giảm tốc) chúng ta thường dùng khi làm xe mô hình với Arduino, các bạn đã biết đôi chút về bộ giảm tốc này rồi. Đặc biệt tác giả của bài viết cũng đã thiết kế riêng cho hộp số này 1 cái đế để gắn cho cái bánh xe vàng. Vì vậy hôm nay mình sẽ giới thiệu nó một cách chi tiết cho các bạn xem.
Cấu tạo và nguyên lí
Bộ hộp số này có cấu tạo gồm 2 motor hoạt động độc lập, giúp bạn điều khiển rẻ trái, phải dễ dàng. Và bao gồm 2 bộ bánh răng cho 2 bên, mỗi bộ gồm 5 chiếc bánh răng. Và gồm 2 cái trục cho 2 bên. Ở đây mình được tặng thêm 2 bánh xe nữa, hihi sướng quá.
Ảnh thực tế

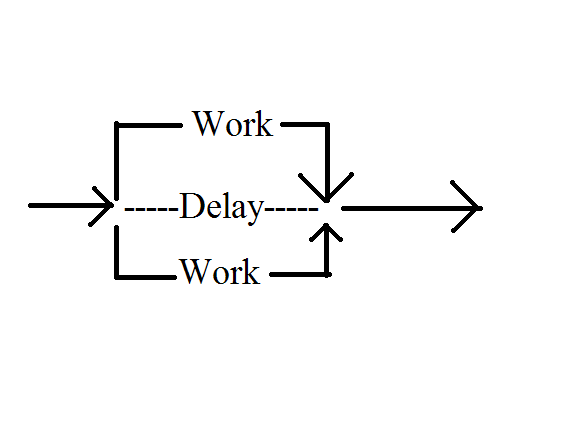
Nguyên lí hoạt động: Nguyên lí này cũng chính là nguyên lí chung của các hộp số động cơ giảm tốc nha mấy bạn.
Nó hoạt động dựa vào định luật về công trong vật lí. Nếu các bạn đã quên hay chưa biết định luật này thì cứ lên google hỏi (Cái này là kiến thức lớp 8). Nói nôm na dể hiểu khi motor quay sẽ tạo ra 1 lực làm cho trục motor quay một quảng đường, nếu ta có thể làm giảm lực kéo của motor ( Không giảm điện áp nhé :), mà ta sẽ dùng các dạng máy cơ ) thì quảng đường trục motor đi được sẽ tăng, ngược lại nếu ta giảm quảng đường motor quay được thì lực kéo sẽ tăng lên (Vận dụng cái này), đó cũng chính là lí do tại sao các động cơ giảm tốc có lực kéo mạnh và quay chậm hơn motor thông thường. Vậy làm sao để biến đổi, ta sẽ dùng các dạng máy cơ. mà ở đây chính là các bánh răng. Dừng tại đây, mình sẽ không nói tại sao bánh răng lại có thể biến đổi như thế. Nếu muốn rõ hơn thì cứ lên google ha :).
Tỉ số truyền
Qua bài viết mình đã nói tới ở đầu bài, các bạn đã biết bộ này có thể chỉnh 4 kiểu tốc độ và độ mạnh, điều này có nghĩa là nó có thể thay đổi 4 tỉ số truyền.
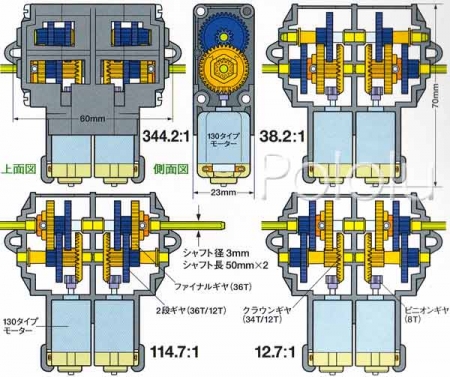
Trước tiên ta phải hiểu tỉ số truyền là gì: Ví dụ cho dễ hiểu nha, ví dụ tỉ số là 3:1 thì quảng đường trục quay được sẽ giảm 3/1 lần và lực quay sẽ tăng 3/1 lần so với quảng đường và lực kéo của motor gốc. Khi hiểu được điều này ta có thể thay đổi tỉ số truyền cho bộ giảm tốc thích hợp với nhu cầu. Bộ hộp số này gồm 4 tỉ số truyền: 12.7 : 1, 38.2 : 1, 114,7 : 1, 344,2 : 1
Sơ đồ tỉ số truyền của bộ hộp số, dựa vào sơ đồ này bạn sẽ có các cách lắp khác nhau để cho ra tỉ số truyền theo ý muốn:
Sau đây là ảnh về tỉ số truyền cao nhất của nó (344.2:1) :

À tất nhiên bạn sẽ phải dùng module điều khiển motor (Ví dụ như L298) để điều khiển nó nha.
Còn bây giờ sẽ là video demo:
Kết luận
Như vậy là chúng ta vừa tìm hiểu xong cấu tạo, nguyên lí hoạt động và cách dùng bộ gear box tamiya 70168 2 Motor rồi. Chúc mọi người cuối tuần nghỉ ngơi vui vẻ.