Thái gửi vào
- 88807 lượt xem
Hôm nay mình sẽ giới thiệu với các bạn một thuật toán được sử dụng rộng rãi có thể là ngay xung quanh các bận đang có thiết bị sử dụng thuật toán này. nôm na là thuật toán này giúp thiết bị của bạn điều kiển đến yêu cầu của bạn một cách nhanh nhất chính xác nhất ít sai số mình không nói nhiều về cách xây dựng công thức hay blala về lí thuyết mình chỉ có ý định giới thiệu về ứng dụng của nó và lượng kiến thức của học sinh cấp 3 chắc chắn có sai sót mong mọi người thông cảm góp ý.
Định nghĩa PID
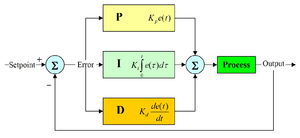
Theo internet thì : Bộ điều khiển Tỷ lệ-P/Tích phân-I/Vi phân-D, hay bộ điều khiển PID hoặc chỉ đơn giản là PID, là một kỹ thuật điều khiển quá trình tham gia vào các hành động xử lý về Tích phân Tỷ lệ và Vi phân, theo đó các tín hiệu sai số xảy đến được làm giảm đến mức tối thiểu bởi ảnh hưởng của tác động tỷ lệ, ảnh hưởng của tác động tích phân và được làm rõ bởi một tốc độ đạt được với tác động vi phân số liệu trước đó. Hoạt động của PID được dựa trên mô hình toán học đối với kết quả phản hồi của một quá trình vòng lặp được điều khiển. Hay nó gọi là một cơ chế phản hồi vòng điều khiển tức là bình tường bạn muốn điều kiển nhiệt độ lò đốt bạn phải đặt mức nhiệt cho nó là 35 độ lúc đạt ngưỡng 35 độ thì ngắt nhiệt, nhưng cách làm này thường có sai số lớn ( độ chính xác 35 độ thấp ), với cơ chế phản hồi vòng điều khiển ( PID ) thì bạn có thể dùng công thức toán học để đưa ra thông số điều kiển cho bộ gia nhiệt trong lò cảm biến sẽ nhận nhiệt độ trong lò kết hợp với giá trị điều kiển gia nhiệt của lò ( vd : lò điện , điện áp ) và sai số đo được tính toán theo công thức để đưa ra giá trị cho thanh gia nhiệt ( điện áp ) gần đến 35 độ thì điện áp giảm để nhiệt tỏa ít

- KP – hằng số điều khiển tỷ lệ
- Ki – hằng số điều khiển tích phân
- Kd – hằng số điều khiển vi phân
Giới thiệu thư viện PID và PID frontEnd
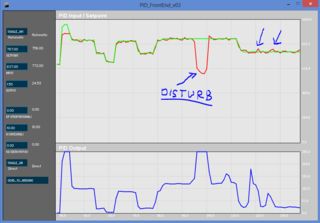
PID frontEnd là phác họa các thông số trong thuật toán
- Download và giải nén các thư viện
-
PID_V1 vào thư mục thư viện vủa Ardunio IDE.
-
Fron End PID đến 1 thư mục trong máy tính của bạn.
-
ControlP5 vào thư mục thư viện vủa Processing.
-
-
Khởi động Arduino IDE và mở file “PID-FrontEnd_ArdunioSampleCode” từ thư mục “PID_frontEnd”.
- Khởi động “Processing” và mở file “PID_frontEnd_v03” từ thư mục “PID_FrontEnd”
Chúng ta có thể nhìn thấy những thay đổi trong PID_FrontEnd bằng đồ họa sinh động