Thái gửi vào
- 87273 lượt xem
Tiép nối bài viết về xe dò line cảm ơn Đỗ Hữu Toàn đã viết hộ mình phần 4. hôm nay mình sẽ làm cho chiếc xe dò line đi mượt và có hồn hơn
Những hình ảnh về dự án:
Bài viết truyền cảm hứng:
Cộng đồng Arduino Việt Nam
Bài viết có thể chưa rõ ràng. Hãy đóng góp thông qua việc bình luận.
Thái gửi vào
Tiép nối bài viết về xe dò line cảm ơn Đỗ Hữu Toàn đã viết hộ mình phần 4. hôm nay mình sẽ làm cho chiếc xe dò line đi mượt và có hồn hơn
Select any filter and click on Apply to see results
Thái gửi vào
Bài viết sẽ hướng dẫn các bận tất tật cách để tạo ra một chiếc xe dò line " đi theo vạch " đơn giản chi phí thấp. Với module tự làm " do mình không có điều kiện để sắm module nên toàn tự làm để sài và lấy kinh nghiệm luôn" hì không có $ để làm dự án khủng hay đẹp cho các bạn thông cảm nha
Thái gửi vào
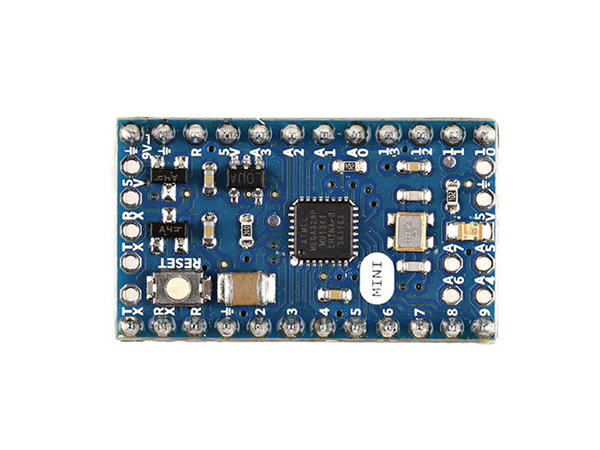
Mình xin giới thiệu Arduino Mini 05 là một phiên bản rất nhỏ gọn của Arduino Nano mà không có USB on-board


Hãy trở thành thành viên của Cộng đồng Arudino Việt Nam để mở khóa chức năng này.
Các bạn chuẩn bị phần cứng như phần 4 có điều phải nối lại dây theo code sau mình không muốn nhắc đến phần cứng
Xây dựng chương trình và thuật toán
Như thế này nếu số 1 là giá trị khi nhận ra line thì số 1 càng dịch sang trái hoặc sang phải thì ta có 10 mức lệch line trong cả trường hợp có hai cảm biến cùng phát hiện ra line, khi đó chúng ta sẽ áp dụng PID để tính toán để đưa ra giá trị điều kiển PWM đến mạch cầu H
các giá trị khi lệch line
Lập trình để nhận và chuyển đổi giá trị
void read_sensor_values() { sensor[0]=digitalRead(A0); sensor[1]=digitalRead(A1); sensor[2]=digitalRead(A2); sensor[3]=digitalRead(A3); sensor[4]=digitalRead(A4); if((sensor[0]==0)&&(sensor[1]==0)&&(sensor[2]==0)&&(sensor[4]==0)&&(sensor[4]==1)) error=4; else if((sensor[0]==0)&&(sensor[1]==0)&&(sensor[2]==0)&&(sensor[4]==1)&&(sensor[4]==1)) error=3; else if((sensor[0]==0)&&(sensor[1]==0)&&(sensor[2]==0)&&(sensor[4]==1)&&(sensor[4]==0)) error=2; else if((sensor[0]==0)&&(sensor[1]==0)&&(sensor[2]==1)&&(sensor[4]==1)&&(sensor[4]==0)) error=1; else if((sensor[0]==0)&&(sensor[1]==0)&&(sensor[2]==1)&&(sensor[4]==0)&&(sensor[4]==0)) error=0; else if((sensor[0]==0)&&(sensor[1]==1)&&(sensor[2]==1)&&(sensor[4]==0)&&(sensor[4]==0)) error=-1; else if((sensor[0]==0)&&(sensor[1]==1)&&(sensor[2]==0)&&(sensor[4]==0)&&(sensor[4]==0)) error=-2; else if((sensor[0]==1)&&(sensor[1]==1)&&(sensor[2]==0)&&(sensor[4]==0)&&(sensor[4]==0)) error=-3; else if((sensor[0]==1)&&(sensor[1]==0)&&(sensor[2]==0)&&(sensor[4]==0)&&(sensor[4]==0)) error=-4; else if((sensor[0]==0)&&(sensor[1]==0)&&(sensor[2]==0)&&(sensor[4]==0)&&(sensor[4]==0)) if(error==-4) error=-5; else error=5; }Bây giờ là phần quan trọng áp dụng công thức PID ta có code để tính toán đưa ra giá trị điều kiển PWM ( mình tham khảo trên internet nha )
void calculate_pid() { P = error; I = I + error; D = error – previous_error; PID_value = (Kp*P) + (Ki*I) + (Kd*D); previous_error=error; }Motor control
void motor_control() { // Calculating the effective motor speed: int left_motor_speed = initial_motor_speed-PID_value; int right_motor_speed = initial_motor_speed+PID_value; // The motor speed should not exceed the max PWM value constrain(left_motor_speed,0,255); constrain(right_motor_speed,0,255); analogWrite(9,left_motor_speed); //Left Motor Speed analogWrite(10,right_motor_speed); //Right Motor Speed //following lines of code are to make the bot move forward /*The pin numbers and high, low values might be different depending on your connections */ digitalWrite(4,HIGH); digitalWrite(5,LOW); digitalWrite(6,LOW); digitalWrite(7,HIGH); }Bây giời đến void loop
void loop() { read_sensor_values(); calculate_pid(); motor_control(); }và đây là hoạt động của xe