Thái gửi vào
- 137388 lượt xem
Bài viết sẽ hướng dẫn các bận tất tật cách để tạo ra một chiếc xe dò line " đi theo vạch " đơn giản chi phí thấp. Với module tự làm " do mình không có điều kiện để sắm module nên toàn tự làm để sài và lấy kinh nghiệm luôn" hì không có $ để làm dự án khủng hay đẹp cho các bạn thông cảm nha
Giới thiệu qua về chiếc xe
Xe dò line, xe đi theo vạch, chúng ta thấy trong cuộc thi robocon vừa diễn ra tại NINH BÌNH quê em " quản bá quê hương và đây là cảm hứng để mình làm" là xe có thể nhận dạng đường đi theo vạch kẻ sẵn thường là vạch đen hoặc trắng nhám, xe sẽ tự điều hướng sao cho nó phải đi theo vạch đã kẻ và mình sắp chia sẻ cách mình làm cho các bạn. Hì

đây là hình mô phỏng eco-robot (2016) về nguyên lý thì chiếc xe của mình xe đi như này nhưng là line đen
Đây là đại diện cho những chiếc xe với khả năng dò line chuẩn xác của các đội tham gia thi robocon. dò line chuẩn và nhanh là yếu tố quyết định chiến thắng. nhưng mình chỉ chia sẻ thành quả mình làm dc. k dc mượt như vậy đâu
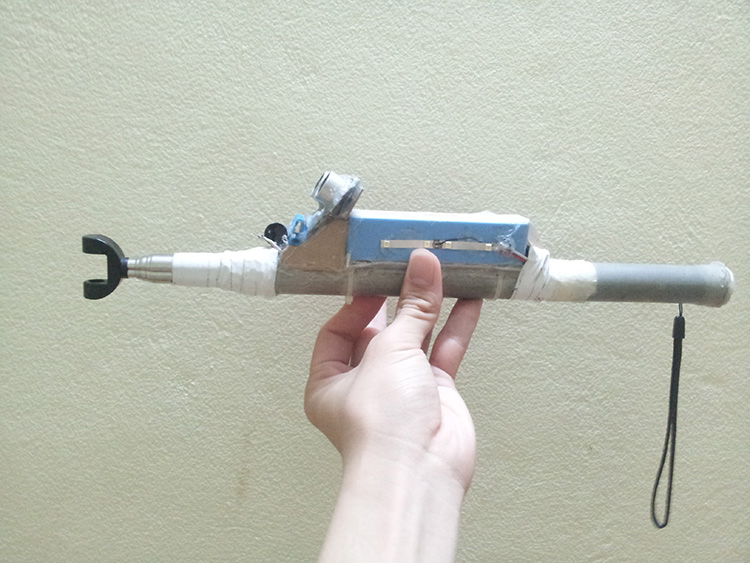
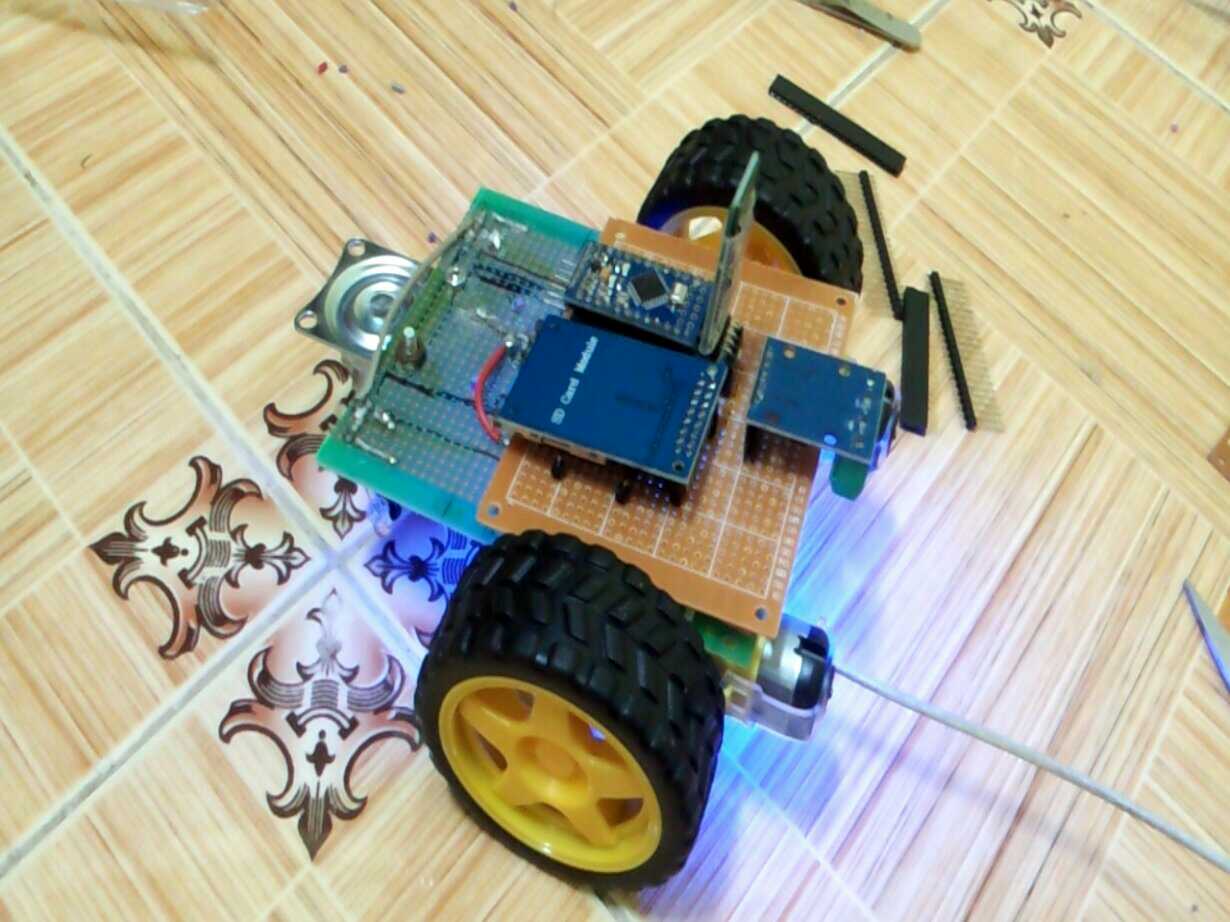
Đây là chiếc xe của mình với cảm biến hồng ngoại để dò line " tự làm vì không có tiền mua " nó đi bị lắc do mình chỉ dùng 2 cảm biến đặt vào hai bên của xe
Bài biết chỉ giới thiệu sơ qua về xe dò line. Ở các bài sau mình sẽ chia sẻ cách làm module hồng ngoại để dò line và mạch cầu H.
Module dò line và cách hoạt động " nguồn internet"
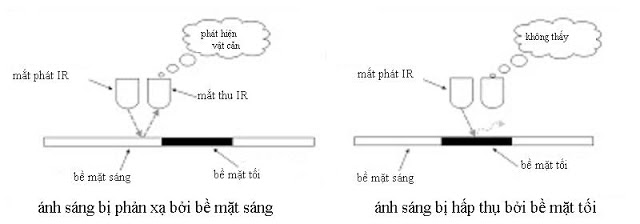
Là 1 loại cảm biến thông dụng được dùng rất nhiều trong các cuộc thi robocon Việt Nam đó là cảm biến phát hiện vật cản hồng ngoại hay cảm biến IR (IR detector), nó được dùng rất nhiều trong các robot tự động dò đường.
Nguyên lý của cảm biến này như sau : mắt phát hồng ngoại sẽ phát ra sóng ánh sáng có bước sóng hồng ngoại , ở mắt thu bình thường thì có nội trở rất lớn (khoảng vài trăm kilo ôm ) , khi mắt thu bị tia hồng ngoại chiếu vào thì nội trở của nó giảm xuống ( khoảng vài chục ôm). Lợi dụng nguyên lý này người ta chế tạo ra các cảm biến IR. Hình sau biểu diễn nguyên lý hoạt động của cảm biến phát hiện vật cản IR:
Bay giờ chúng ta dùng 1 con oppam như lm358p chẳng hạn để tạo các mức logic 0 và 1 bằng cách so sánh 2 giá trị điện áp của cầu chia điện trở (ở đây ta dùng biến trở ) và điện áp trên anot của mắt nhận hồng ngoại Nếu khi có tia hồng ngoại chiếu vào mắt nhận thì nội trở mắt nhận giảm nên điện áp trên cực anot của mắt nhận sẽ tăng lên , khi điện áp này lớn hơn điện áp của cầu phân áp bằng điện trở thì mức điện áp ra sẽ là VCC ( mức logic 1) ngược lại là mức logic 0.
Như vậy chúng ta sẽ hiểu dc cách thức để dò line
Cách để xe đi theo line hay bám line
Mình dùng 2 cảm biến hồng ngoại đặt vào 2 bên của xe để giúp chiếc xe nhận diện được xe đang lệch sang bên trái hay phải từ đó điều kiển hướng của xe đi dễ dàng.
Ví dụ : xe lệch về bên phải thì cảm biến bên trái sẽ có tí hiệu là 0 do cảm biến đang ở vùng đen.
- Lúc này mình xe cho động cơ quay sang trái.
- Xe lệch vè bên trái thì cảm biến bên phải sẽ có tín hiệu là 0 do cảm biến đang ở vùng đen.
- Lúc này mình sẽ cho xe quay trái để xe vào giữa line.
Như này bạn có thể hình dung dần code rất đơn giản phải không các bạn.
Mọi thắc mắc hay góp ý các bạn hãy bình luận phía dưới hoặc liên hệ trực tiếp với mình qua địa chỉ ở trang cá nhân của mình.
Còn nữa
Các bạn hãy chờ phần 2 của bài viết nhé. Mình đang dần hoàn thiện và sẽ có sớm trong tuần tới. Hãy xem nguyên lý và sẵn sàng cho tương lai bạn nhé!