Đỗ Hữu Toàn gửi vào
- 33343 lượt xem
I. Giới thiệu
Hôm nay, chúng ta sẽ tìm cách nói chuyện với Raspberry Pi bằng ngôn ngữ C++. Thay vì sử dụng các ngôn ngữ Python, NodeJS thì C++ là một ngôn ngữ rất gần gũi với những ai đã có một nền tảng Arduino vững chắc. C++ cơ bản đủ để lập trình Raspberry pi cũng rất dễ học ( C++ cơ bản thôi nha...còn chuyên nghiệp thì là ngôn ngữ khó nhất rồi ). Vì vậy, mình sẽ cùng các bạn khám phá nó!!! Nào cùng bắt đầu thôi!!!
II. Chuẩn bị
III. Kết nối
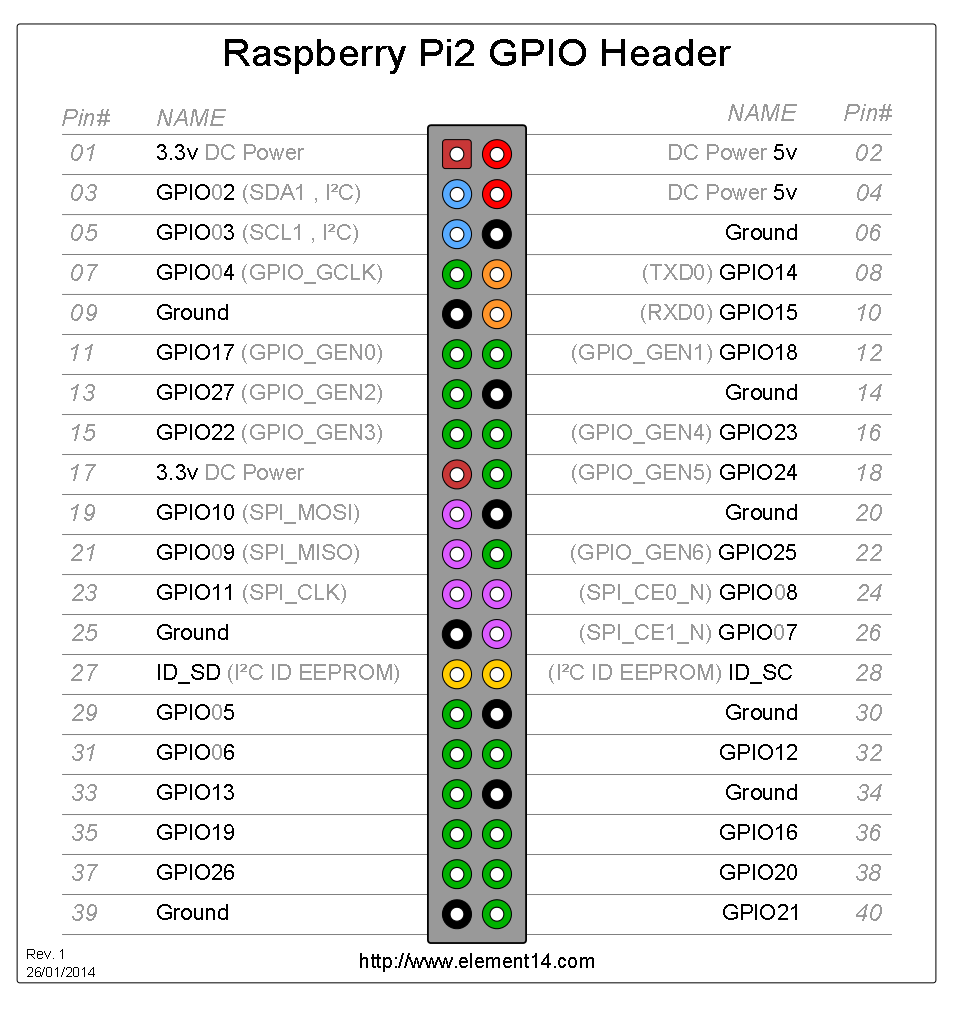
Trước khi kết nối, bạn tham khảo sơ đồ chân Raspberry pi 2 dưới đây
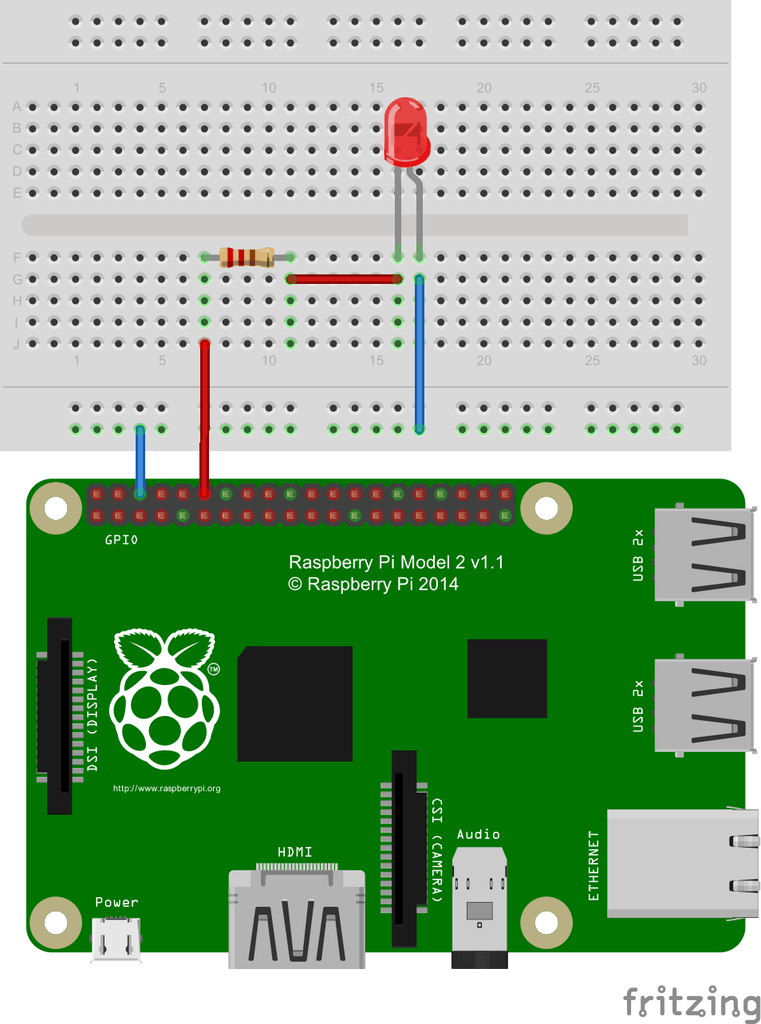
Bạn nối theo sơ đồ sau ( ở đây mình dùng chân 18 ):
IV. Lập trình
a. Cài đặt thư viện
-
Bước 1: Vào thư mục Desktop
cd /home/pi/Desktop/
-
Bước 2: Tạo một thư mục Programming
mkdir Programming
-
Bước 3: Vào thư mục Programming
cd Programming
-
Bước 4: download thư viện “bcm2835-1.37”
wget http://www.airSpayce.com/mikem/bcm2835/bcm2835-1.39.tar.gz
-
Bước 5: giải nén file “bcm2835-1.37.tar.gz"
tar –zxvf bcm2835-1.37.tar.gz
-
Bước 6: vào thư mục vừa giải nén xong “bcm2835-1.37”
cd bcm2835-1.37
-
Bước 7: Chạy configure:
sudo ./configure
-
Bước 8: chạy makefile cho thư viện:
make
-
Bước 9: Cài đặt makefile vừa tạo ra:
sudo make install
Ok!!! Thế là xong phần thư viện nhé
b. Lập trình với led
-
Đầu tiên, bạn tạo một thư mục blink, sau đó..tạo một chương trình có tên là “blink.c”:
cd /blink sudo nano blink.c
Code cho blink.c nhé:
#include <bcm2835.h>// Load thư viện
#define PIN RPI_V2_GPIO_P1_18 // chân PIN là chân 18
int main(int argc, char **argv)
{
if (!bcm2835_init())
return 1;
//setup
bcm2835_gpio_fsel(PIN, BCM2835_GPIO_FSEL_OUTP);// set chân PIN là OUTPUT
//loop
// Bắt đầu code chính
while (1)
{
bcm2835_gpio_write(PIN, HIGH);//digitalWrite(PIN, HIGH);
bcm2835_delay(500);//delay(500)
bcm2835_gpio_write(PIN, LOW);//digitalWrite(PIN, LOW);
bcm2835_delay(500);//delay(500);
}
bcm2835_close();// Close bcm2835
return 0;// trả về 0 khi chương trình kết thúc
}Sau đó, các bạn biên dịch chương trình “c” sẽ tạo ra file “blink”
gcc –o blink blink.c -l bcm2835
Chạy file vừa được biên dịch xong :
sudo ./blink
Hưởng thụ thành quả thôi!!!!
c. Đọc giá trị INPUT
-
Đầu tiên cũng tạo một file input.c như trên nhé
Code cho input.c:
#include <bcm2835.h>
#include <stdio.h>
#define PIN RPI_GPIO_P1_15// PIN là chân 15
int main(int argc, char **argv)
{
if (!bcm2835_init())
return 1;// nếu thư viện chưa sẵn sàng... báo lỗi (1) rồi kết thúc chương trình
//code setup
bcm2835_gpio_fsel(PIN, BCM2835_GPIO_FSEL_INPT);//pinMode(PIN, INPUT);
bcm2835_gpio_set_pud(PIN, BCM2835_GPIO_PUD_UP);
// Code loop
while (1)
{
uint8_t value = bcm2835_gpio_lev(PIN);//int value = digitalRead(PIN);
printf("Giá trị chân PIN 15 là: %d\n", value);//Serial.print("Giá trị PIN 15 là:");
// Serial.println(value);
bcm2835_delay(500);//delay(500);
}
bcm2835_close();
return 0;
}Biên dịch code rồi chạy giống như trên là ok
V. Lời kết
Trên đây, là cách lập trình C++ cơ bản để điều khiển chân GPIO với raspberry Pi. Chúc các bạn thành công!!!