loc4atnt gửi vào
- 75205 lượt xem
Đây là phần 8 của chuỗi bài viết "Lập trình Arduino không cần viết code"
- Xem lại phần 7 tại đây
Ở phần trước mình đã hướng dẫn các bạn cách làm việc với cảm biến đưa ra tín hiệu là digital và analog (Cụ thể ở phần đó là cảm biến mưa). Và ở phần này là 1 con cảm biến thuộc một loại khác. Cảm biến này có tên là cảm biến siêu âm.
Cảm biến siêu âm
Cảm biến siêu âm có chức năng là giúp chúng ta xác định được khoảng cách tới vật cản trước mặt nó. Tuy nhiên nó không giúp xác định trực tiếp mà ta phải lập trình cho nó. Nó gồm 4 chân và 2 con mắt(Mắt trig và mắt echo):
| Vcc | 5V |
| GND | GND |
| Trig (Phát sóng siêu âm) | Dpin |
| Echo (Thu sóng siêu âm) | Dpin |

Nguyên lí hoạt động như sau: Khi ta cấp cho chân trig một tín hiệu điện ngắn, mắt trig sẽ phát ra 1 luồng sóng siêu âm, trong lúc sóng này di chuyển thì ta sẽ đếm thời gian nó di chuyển. Khi sóng siêu âm chạm vật cản và dội ngược lại sẽ được mắt echo thu lại và làm cho chân echo báo về tín hiệu high, đến lúc này ta sẽ dừng đếm thời gian. Như vậy sóng siêu âm sẽ đi 2 lần khoảng cách đến vật cản. Và ta sẽ nhân thời gian với vận tốc sóng chia 2. Nhưng làm thế nào mà ta đếm được thời gian, ta sẽ đếm thời gian chân echo đợi cho tới khi nhận được tín hiệu HIGH.
Thực hành
Trước khi thực hànhmình xin nhắc là trong bài này có sử dụng kiến thức bài trước (Serial) nên để hiểu và làm đúng thì cần đọc bài trước.
Chuẩn bị
- Arduino
- Cảm biến siêu âm (Mình dùng con HC-SRF04)
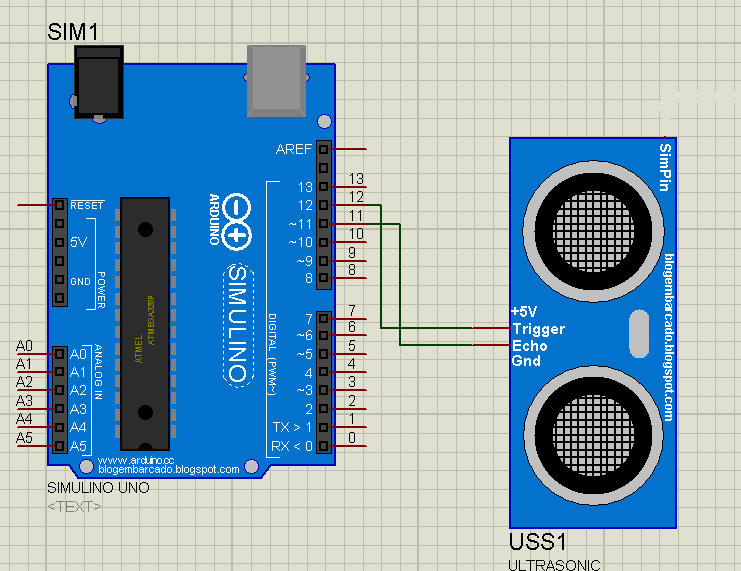
Lặp mạch như sơ đồ.
Lập trình với mBlock
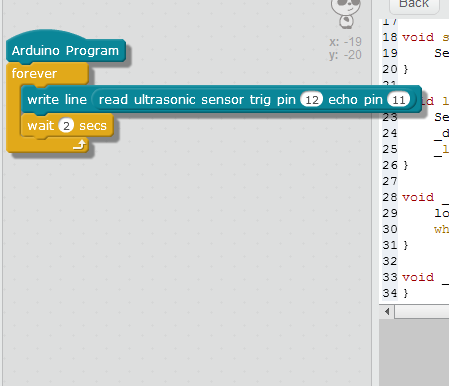
Chọn Arduino Mode, mở khối Serial và lập trình theo sơ đồ sau:
Ngắt kết nối cổng COM của arduino nếu đang kết nối .Vì mBlock bị 1 lỗi trong Serial, nên cần chỉnh code một tí, chọn Edit with Arduino IDE:
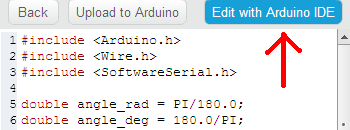
Bỏ dòng như trong hình (Dòng MeSerial se):
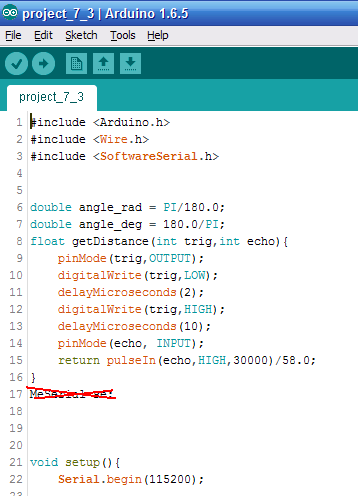
Up code, tắt arduino IDE, bật lại cổng COM của arduino trên mBlock và hưởng thụ.
Lập trình với Arduino IDE
Code đây nè
#define trig 10
#define echo 11
void setup()
{
pinMode(trig,OUTPUT);
pinMode(echo,INPUT);
Serial.begin(9600);
}
void loop()
{
Serial.print(objectDistance_cm());
Serial.println("cm");
delay(2000);
}
int objectDistance_cm()
{
unsigned long thoigian;
int distance;
/*Phat xung tu chan Trig*/
digitalWrite(trig,0);
delayMicroseconds(2);
digitalWrite(trig,1);
delayMicroseconds(5);
digitalWrite(trig,0);
/*Tinh toan*/
thoigian = pulseIn(echo,1);
distance = int(thoigian/2/29.412);
return distance;
}
Kết luận
Như vậy là chúng ta vừa tìm hiểu xong cách xác định khoảng cách với vật cản bằng cảm biến siêu âm. Mình vọng rằng bài viết này nói riêng và chuỗi bài nói chung sẽ mang lại nhiều kiến thức mới và giúp ích cho các bạn newbie. Xin cảm ơn đã theo dõi.