NTP_PRO gửi vào
- 328057 lượt xem
Xin chào, hôm nay mình sẽ giới thiệu về cách sử dụng cảm biến khoảng cách HC-SR04.
1. Nội dung
Bài viết này sẽ trình bày 2 nội dung chính là:
- Tìm hiểu nguyên lý hoạt động của HC-SR04.
- Cách sử dụng với Arduino.
2. Phần cứng
3. Giới thiệu cảm biến đo khoảng cách HC-SR04
Cảm biến khoảng cách siêu âm HC-SR04 được sử dụng rất phổ biến để xác định khoảng cách vì RẺ và CHÍNH XÁC. Cảm biến sử dụng sóng siêu âm và có thể đo khoảng cách trong khoảng từ 2 -> 300 cm, với độ chính xác gần như chỉ phụ thuộc vào cách lập trình.
Cảm biến HC-SR04 có 4 chân là: Vcc, Trig, Echo, GND.
| Vcc | 5V |
| Trig | Một chân Digital output |
| Echo | Một chân Digital input |
| GND | GND |
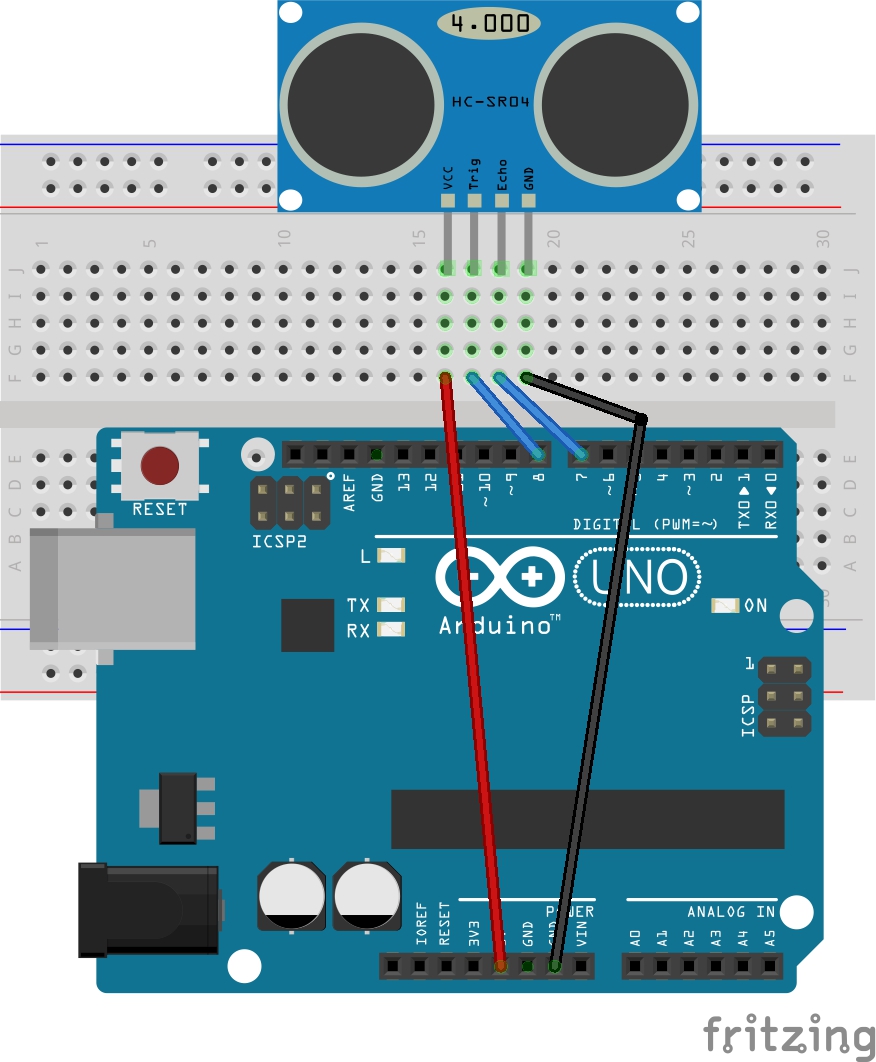
Sơ đồ nối chân giữa HC-SR04 và Arduino
Nguyên lý hoạt động
Để đo khoảng cách, ta sẽ phát 1 xung rất ngắn (5 microSeconds - ú) từ chân Trig. Sau đó, cảm biến sẽ tạo ra 1 xung HIGH ở chân Echo cho đến khi nhận lại được sóng phản xạ ở pin này. Chiều rộng của xung sẽ bằng với thời gian sóng siêu âm được phát từ cảm biển và quay trở lại.
Tốc độ của âm thanh trong không khí là 340 m/s (hằng số vật lý), tương đương với 29,412 microSeconds/cm (106 / (340*100)). Khi đã tính được thời gian, ta sẽ chia cho 29,412 để nhận được khoảng cách.
4. Lắp mạch
5. Lập trình
const int trig = 8; // chân trig của HC-SR04
const int echo = 7; // chân echo của HC-SR04
void setup()
{
Serial.begin(9600); // giao tiếp Serial với baudrate 9600
pinMode(trig,OUTPUT); // chân trig sẽ phát tín hiệu
pinMode(echo,INPUT); // chân echo sẽ nhận tín hiệu
}
void loop()
{
unsigned long duration; // biến đo thời gian
int distance; // biến lưu khoảng cách
/* Phát xung từ chân trig */
digitalWrite(trig,0); // tắt chân trig
delayMicroseconds(2);
digitalWrite(trig,1); // phát xung từ chân trig
delayMicroseconds(5); // xung có độ dài 5 microSeconds
digitalWrite(trig,0); // tắt chân trig
/* Tính toán thời gian */
// Đo độ rộng xung HIGH ở chân echo.
duration = pulseIn(echo,HIGH);
// Tính khoảng cách đến vật.
distance = int(duration/2/29.412);
/* In kết quả ra Serial Monitor */
Serial.print(distance);
Serial.println("cm");
delay(200);
}Giải thích
- duration = pulseIn(echo,1);
Hàm pulseIn() được dùng để đo độ rộng của xung, các bạn có thể xem thêm tại link sau: http://arduino.vn/reference/pulsein. Duration sẽ bằng độ dài xung HIGH ở chân echo (tính theo micro giây).
- distance = int(duration/2/29.412);
Thời gian sóng truyền từ cảm biến đến vật sẽ bằng duration/2, sau đó ta chia tiếp cho 29,412 để tính khoảng cách.
6. Lời kết
Hãy ứng dụng vào thực tế nhé. Chúc các bạn thành công!
Trên kBOT - Wifi Robot, cảm biến này đã được tác giả sử dụng để làm radar đo khoảng cách phía sau đuôi đấy. Với cảm biến siêu âm bạn cũng có thể dùng để đếm sản phẩm hoặc cảm biển khoảng cách cầm tay,...




{kind=link}