loc4atnt gửi vào
- 50295 lượt xem
Đây là phần 12 của chuỗi bài viết "Lập trình Arduino không cần viết code"
- Xem lại phần 11 tại đây
Ở phần 9 mình đã hướng dẫn cách điều khiển motor với module L298, đồng thời ở phần trước mình cũng đã hướng dẫn cách tạo một hàm riêng. Hôm nay mình sẽ hướng dẫn các bạn tạo hàm điều khiển motor cho module L298. Vào luôn!
Cách làm
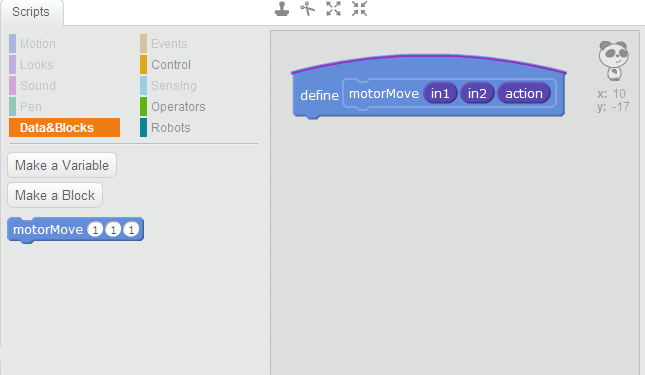
Chúng ta sẽ tạo một hàm gồm 3 thông số thuộc kiểu số là: in1, in2 và action. Trong đó, in1 và in2 là 2 chân điều khiển motor nối với arduino, action là trạng thái motor gồm đứng yên (0), quay theo chiều thứ nhất (1), quay theo chiều thứ hai (2).
Thực hành
Chuẩn bị
- Arduino mình dùng con Uno
- Module điều khiển động cơ motor L298
- 1 con motor hoặc 2 nếu muốn
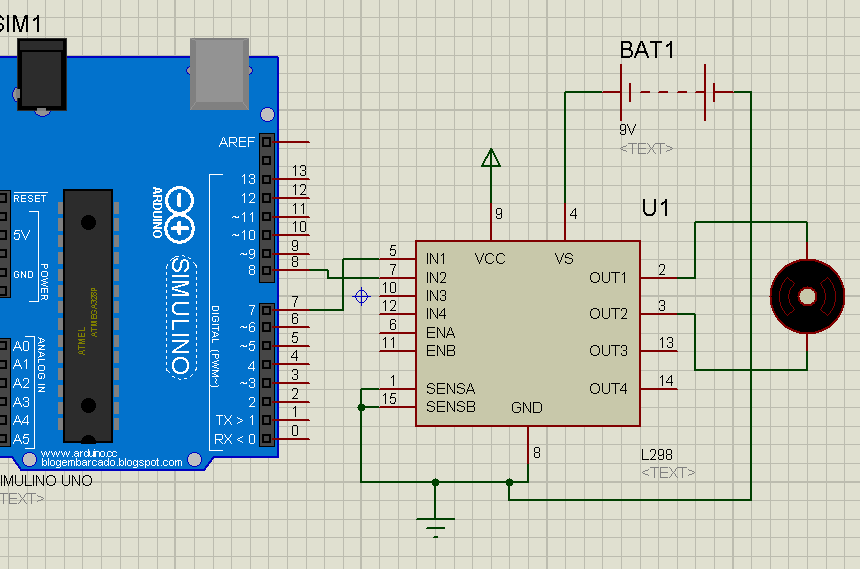
Nối mạch như sau, Vs là chân 12V, senA, senB được nối chung với GND ở module thực nên khi nhìn module thiệt đừng hỏi sao không thấy nó:
Lập trình với mBlock
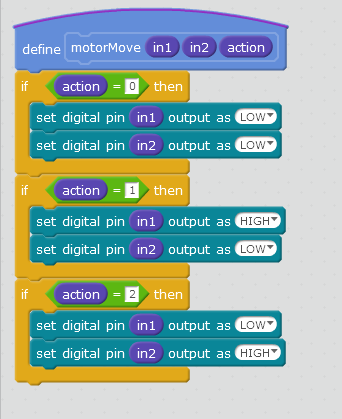
Trước tiên tạo một hàm mới gồm 3 thông số như hình
Lập trình cho hàm theo sơ đồ
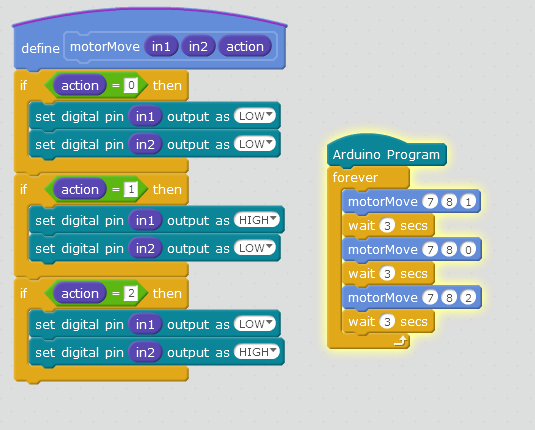
Lập trình chính cho arduino
mBlock bị lỗi ở pinMode nên cần chỉnh code một tí tẹo
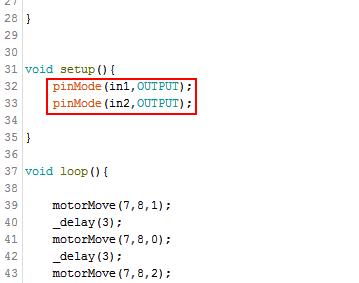
Ở hàm setup, chỉnh in1 thành 7 và in2 thành 8, nếu muốn điều khiển thêm 1 motor nữa thì lập trình tương tự như trên, sau đó chỉnh lại in1, in2 và thêm 2 dòng pinMode nữa cho motor 2.
Ok, úp luôn đi.
Lập trình với Arduino
Phần cứng y như đúc, phần code thì thế này nè:
#define inA1 7
#define inA2 8
void setup()
{
pinMode(inA1,OUTPUT);
pinMode(inA2,OUTPUT);
}
void loop()
{
motorMove(inA1,inA2,1);
delay(3000);
motorMove(inA1,inA2,0);
delay(3000);
motorMove(inA1,inA2,2);
delay(3000);
}
void motorMove(int in1,int in2, byte action)
{
switch(action)
{
case 0: //Dung
digitalWrite(in1,0);
digitalWrite(in2,0);
break;
case 1: //Chieu thu 1
digitalWrite(in1,1);
digitalWrite(in2,0);
break;
case 2: //Chieu thu 2
digitalWrite(in1,0);
digitalWrite(in2,1);
break;
}
}Kết luận
Như vậy là ta vừa tìm hiểu xong cách tạo hàm điều khiển motor với module L298. Vậy lí do gì mà mình lại giới thiệu về hàm này thì các bạn sẽ biết ở phần sau. Xin cảm ơn đã theo dõi. Chúc các bạn thành công.