loc4atnt gửi vào
- 44065 lượt xem
Đây là phần 14 của chuỗi bài viết "Lập trình Arduino không cần viết code"
- Xem lại phần 13 tại đây.
Xin chào các bạn, hôm nay chúng ta sẽ cùng tìm hiểu về timer và cách sử dụng nó trong mBlock cũng như trong Arduino. Xơi luôn
Timer là gì
Về cơ bản nó chính là bộ đếm thời gian trong vi điều khiển Arduino. Nó sẽ bắt đầu đếm khi chương trình bắt đầu chạy và chỉ dừng lại khi ta dừng chạy chương trình. Bạn có thể tìm hiểu hơn về timer qua từ khóa đó trên mục tìm kiếm. Vậy ứng dụng của nó là gì? Đa số nó được ứng dụng để chạy các hàm, lệnh song song nhau. Phần sau mình sẽ chỉ 1 ví dụ. Nhưng ngay bây giờ bạn hãy nghĩ về việc blink 2 led theo 2 khoảng thời gian nháy khác nhau cùng nhau sẽ như thế nào để chuẩn bị cho phần sau.
Thực hành
Chuẩn bị
1 con arduino và chỉ thế thoi.
Lập trình với mBlock
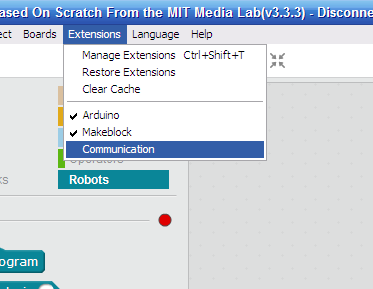
Trước tiên mở khối Serial ra.
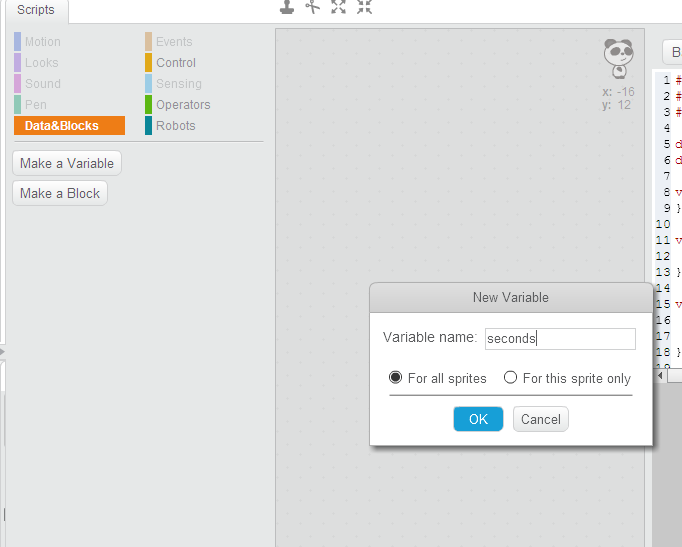
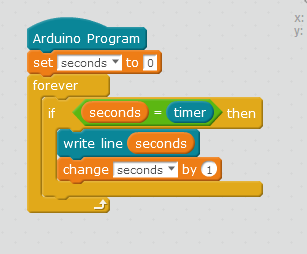
Tạo một biến đếm giây để in ra serial, vì nếu dùng timer trực tiếp nóp sẽ đếm liên tục, trong khi mình chỉ cần đếm theo giây.
Lập trình theo sơ đồ sau.
Sửa code một tí, không cần sửa cũng được nhưng thời gian úp hơi lâu nên sửa đi nha.
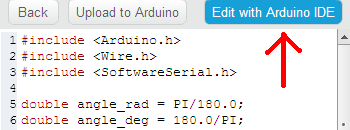
Sửa lại như hình
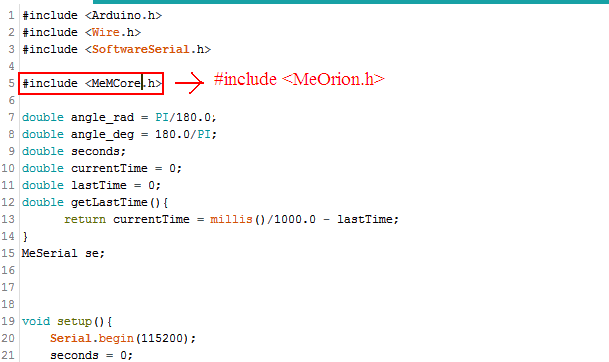
Ok, úp code
Lập trình với Arduino IDE
Trong arduino, để kiểm tra xem thời gian hiện tại là bao nhiêu ta dùng hàm millis().
Code đây
int seconds;
int currentTime = 0;
int getLastTime(){
return currentTime = millis()/1000.0;
}
void setup(){
Serial.begin(9600);
}
void loop(){
if(seconds==getLastTime())
{
Serial.println(seconds);
seconds += 1;
}
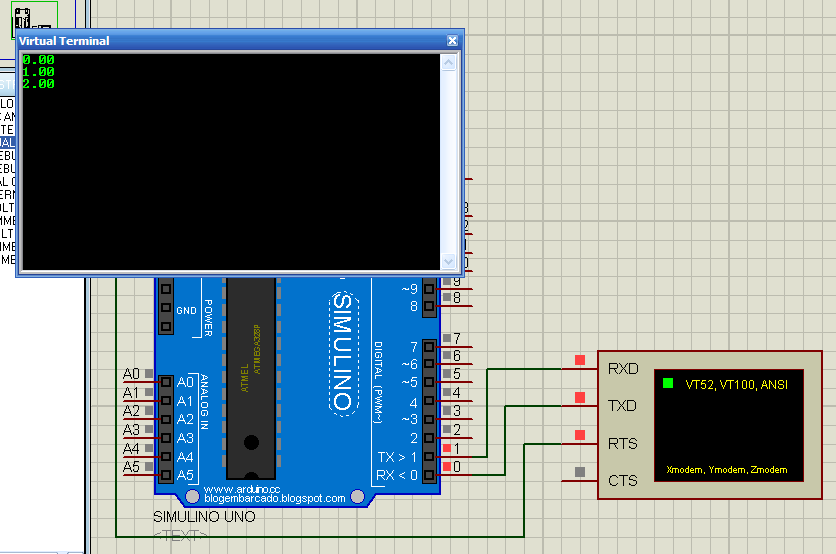
}Thành quả đây
Kết luận
Như vậy là ta vừa tìm hiểu xong cách sử dụng timer trong arduino. Ở phần sau mình sẽ đưa ra 1 ví dụ về timer. Cảm ơn đã quan tâm theo dõi, Chúc các bạn thành công.