Đỗ Hữu Toàn gửi vào
- 61861 lượt xem
Giới thiệu
Khi chúng ta làm 1 project lớn, bạn sẽ phải viết chương trình thực hiện nhiều chức năng. Và khi đó, bạn sẽ gặp nhiều vấn đề phức tạp : làm như thế nào để chương trình hoạt động ổn định khi kết hợp nhổi nhét nhiều đoạn code đơn giản thành 1 khối thống nhất?. Ở bài viết này, chúng ta cùng đi giải quyết vấn đề trên. Trên Arduino.vn cũng đã có nhiều bài viết về xử lý bất đồng bộ rất hay. Các bạn có thể xem tại đây. Vậy mục đích viết bài của mình hôm nay là gì? Hôm nay mình sẽ giới thiệu một thư viện đa nhiệm mới khác, đó chính là FreeRTOS
FreeRTOS là gì?? FreeRTOS là một hệ điều hành nhúng thời gian thực (Real Time Operating System) mã nguồn mở được phát triển bởi Real Time Engineers Ltd, sáng lập và sở hữu bởi Richard Barry. FreeRTOS được thiết kế phù hợp cho nhiều hệ nhúng nhỏ gọn vì nó chỉ triển khai rất ít các chức năng như: cơ chế quản lý bộ nhớ và tác vụ cơ bản, các hàm API quan trọng cho cơ chế đồng bộ. Nó không cung cấp sẵn các giao tiếp mạng, drivers, hay hệ thống quản lý tệp (file system) như những hệ điều hành nhúng cao cấp khác. Tuy vậy, FreeRTOS có nhiều ưu điểm, hỗ trợ nhiều kiến trúc vi điều khiển khác nhau, kích thước nhỏ gọn (4.3 Kbytes sau khi biên dịch trên Arduino), được viết bằng ngôn ngữ C và có thể sử dụng, phát triển với nhiều trình biên dịch C khác nhau (GCC, OpenWatcom, Keil, IAR, Eclipse, …), cho phép không giới hạn các tác vụ chạy đồng thời, không hạn chế quyền ưu tiên thực thi, khả năng khai thác phần cứng. Ngoài ra, nó cũng cho phép triển khai các cơ chế điều độ giữa các tiến trình như: queues, counting semaphore, mutexes. (Wikipedia).
Cách sử dụng FreeRTOS
Cài đặt thư viện FreeRTOS trên Arduino IDE
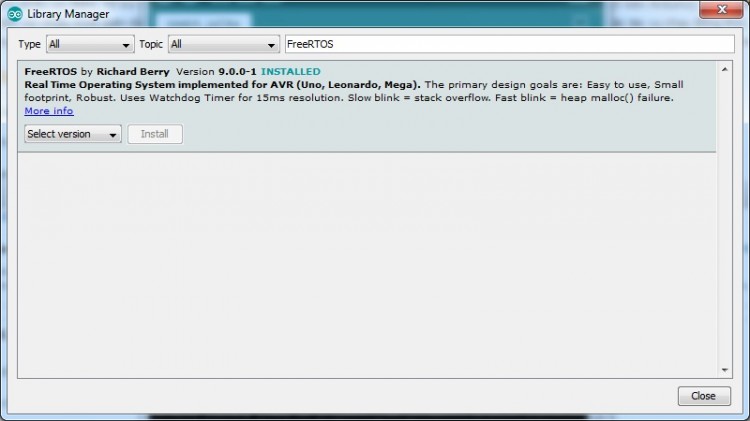
Để bắt đầu với FreeRTOS, chúng ta cần cài đặt thư viện của nó trên Arduino IDE đã:
Ở giao diện chính của Aruduino IDE, Sketch > Include Library > Manage Libraries. Search từ khóa FreeRTOS và cài đặt thư viện
Cấu trúc chương trình
#include <Arduino_FreeRTOS.h>
// Khai báo nhiệm vụ:
void TaskBlink( void *pvParameters );
void TaskAnalogRead( void *pvParameters );
// the setup function runs once when you press reset or power the board
void setup() {
// initialize serial communication at 9600 bits per second:
Serial.begin(9600);
while (!Serial) {
; // wait for serial port to connect. Needed for native USB, on LEONARDO, MICRO, YUN, and other 32u4 based boards.
}
// Thiết lập nhiệm vụ để chạy độc lập
xTaskCreate(
Task1
, (const portCHAR *)"Task1" // A name just for humans
, 128 // Bộ nhớ RAM để cho tiến trình hoạt động >= 64byte
, NULL
, 2 // Mức độ ưu tiên
, NULL );
xTaskCreate(
Task2
, (const portCHAR *) "Task2"
, 128 // Stack size
, NULL
, 1 // Priority
, NULL );
// Now the task scheduler, which takes over control of scheduling individual tasks, is automatically started.
}
void loop()
{
// Chương trình chính đã được thực hiện trong các Task nên loop() trống
}
/*--------------------------------------------------*/
/*---------------------- Tasks ---------------------*/
/*--------------------------------------------------*/
void Task1(void *pvParameters) // This is a task.
{
(void) pvParameters;
//Code được đặt ở đây sẽ chạy 1 lần giống void setup()
for (;;)
{
//Code được đặt trong đây sẽ tương đương với hàm void loop()
}
}
void Task2(void *pvParameters) // This is a task.
{
(void) pvParameters;
for (;;)
{
}
}
FreeRTOS Example
Đây là code mẫu thực hiện 2 nhiệm vụ là nháy led và đọc giá trị analog:
#include <Arduino_FreeRTOS.h>
// define two tasks for Blink & AnalogRead
void TaskBlink( void *pvParameters );
void TaskAnalogRead( void *pvParameters );
// the setup function runs once when you press reset or power the board
void setup() {
// initialize serial communication at 9600 bits per second:
Serial.begin(9600);
while (!Serial) {
; // wait for serial port to connect. Needed for native USB, on LEONARDO, MICRO, YUN, and other 32u4 based boards.
}
// Now set up two tasks to run independently.
xTaskCreate(
TaskBlink
, (const portCHAR *)"Blink" // A name just for humans
, 128 // This stack size can be checked & adjusted by reading the Stack Highwater
, NULL
, 2 // Priority, with 3 (configMAX_PRIORITIES - 1) being the highest, and 0 being the lowest.
, NULL );
xTaskCreate(
TaskAnalogRead
, (const portCHAR *) "AnalogRead"
, 128 // Stack size
, NULL
, 1 // Priority
, NULL );
// Now the task scheduler, which takes over control of scheduling individual tasks, is automatically started.
}
void loop()
{
// Empty. Things are done in Tasks.
}
/*--------------------------------------------------*/
/*---------------------- Tasks ---------------------*/
/*--------------------------------------------------*/
void TaskBlink(void *pvParameters) // This is a task.
{
(void) pvParameters;
/*
Blink
Turns on an LED on for one second, then off for one second, repeatedly.
Most Arduinos have an on-board LED you can control. On the UNO, LEONARDO, MEGA, and ZERO
it is attached to digital pin 13, on MKR1000 on pin 6. LED_BUILTIN takes care
of use the correct LED pin whatever is the board used.
The MICRO does not have a LED_BUILTIN available. For the MICRO board please substitute
the LED_BUILTIN definition with either LED_BUILTIN_RX or LED_BUILTIN_TX.
e.g. pinMode(LED_BUILTIN_RX, OUTPUT); etc.
If you want to know what pin the on-board LED is connected to on your Arduino model, check
the Technical Specs of your board at https://www.arduino.cc/en/Main/Products
This example code is in the public domain.
modified 8 May 2014
by Scott Fitzgerald
modified 2 Sep 2016
by Arturo Guadalupi
*/
// initialize digital LED_BUILTIN on pin 13 as an output.
pinMode(LED_BUILTIN, OUTPUT);
for (;;) // A Task shall never return or exit.
{
digitalWrite(LED_BUILTIN, HIGH); // turn the LED on (HIGH is the voltage level)
vTaskDelay( 1000 / portTICK_PERIOD_MS ); // wait for one second
digitalWrite(LED_BUILTIN, LOW); // turn the LED off by making the voltage LOW
vTaskDelay( 1000 / portTICK_PERIOD_MS ); // wait for one second
}
}
void TaskAnalogRead(void *pvParameters) // This is a task.
{
(void) pvParameters;
/*
AnalogReadSerial
Reads an analog input on pin 0, prints the result to the serial monitor.
Graphical representation is available using serial plotter (Tools > Serial Plotter menu)
Attach the center pin of a potentiometer to pin A0, and the outside pins to +5V and ground.
This example code is in the public domain.
*/
for (;;)
{
// read the input on analog pin 0:
int sensorValue = analogRead(A0);
// print out the value you read:
Serial.println(sensorValue);
vTaskDelay(1); // one tick delay (15ms) in between reads for stability
}
}Kết luận
Với thư viện FreeRTOS các bạn có thể dễ dàng kết nối các đoạn code nhỏ thành 1 đoạn code "chà bá" cho những project lớn mà vẫn chạy ổn định rồi.
Nguồn tham khảo:
- https://www.hackster.io/feilipu/using-freertos-multi-tasking-in-arduino-ebc3cc
- http://www.instructables.com/id/FreeRTOS-01-Setting-Up-FreeRTOS-on-Arduino/
Dưới đây là video nước ngoài ví dụ về FreeRTOS


