Tôi yêu Arduino gửi vào
- 35564 lượt xem
I. Giới thiệu
Trong thực tế, có rất nhiều trường hợp cần phải reset mạch Arduino để giải quyết vấn đề. Ví dụ như: nhiễu điện khi dùng module NRF24L01 hoặc module 315MHz. Trong bài viết này mình sẽ hướng dẫn các bạn reset board mạch Arduino từ các dòng code trong Arduino để các bạn có thể "tự động reset" board để tự "giải nhiễu".
II. Các cách để reset board Arduino
1. Reset bằng cách điều khiển chân RST (reset)
Chúng ta sẽ dùng một chân bất kỳ trên Arduino và cài đặt nó thành một chân OUTPUT. Và khi bạn digitalWrite LOW vào chân đó thì board sẽ được reset. Để dễ hiểu, bạn xem hình sau.
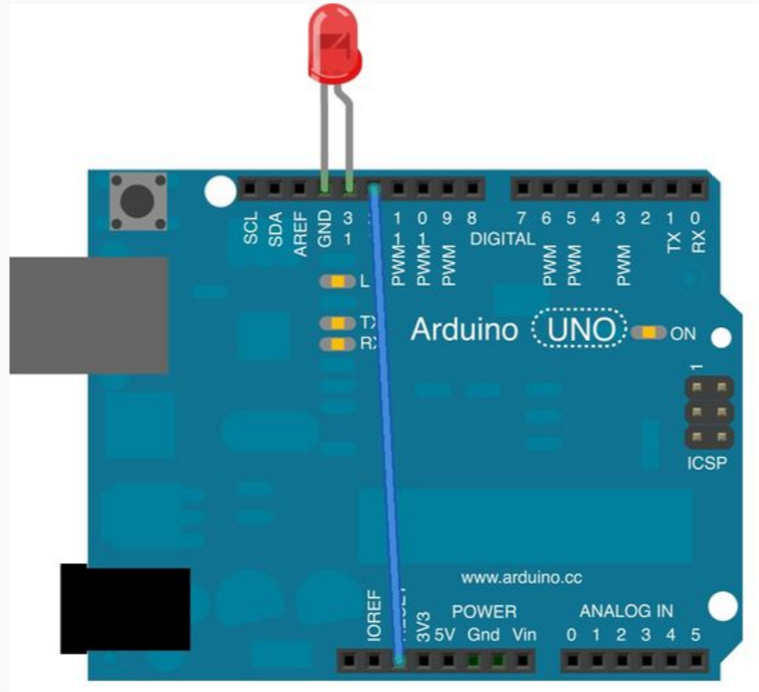
Mình sẽ làm blink con led 13 và reset board Arduino.
int led = 13;//chân led 13
int resetPin = 12;//chân reset
void setup() {
digitalWrite(resetPin, HIGH);//bật chân reset lên HIGH (khi có pinMode output thì nó sẽ đặt là HIGH thay vì LOW như mặc định), luôn luôn để dòng này đầu tiên.
pinMode(resetPin, OUTPUT); //pinMode output cho chân reset
delay(200);
//khởi tạo serial port
pinMode(led, OUTPUT);
Serial.begin(9600);//initialize Serial Port
delay(200);
}
void loop() {
delay(10);
digitalWrite(led, HIGH);
Serial.println("bat");
delay(1000);
digitalWrite(led, LOW);
Serial.println("tat");
delay(1000);
Serial.println("resetting");
delay(10);
digitalWrite(resetPin, LOW);//tiến hành reset
Serial.println("chay duoc chet lien");
//trong dòng loop sẽ không bao giờ chạy được vì board arduino đa reset
}
2. Chỉ sử dụng phần mềm thôi (nên dùng)
Bạn không cần làm gì nhiều, chúng ta chỉ việc khai báo một con trỏ hàm dùng cho reset bằng cách khai báo địa chỉ ô nhớ nó trỏ về là 0. Phức tạp ha? Nhưng nếu là newbie thì bạn chỉ cần đặt tên hàm như sau và gọi nó khi cần reset là được!
...
void(* resetFunc) (void) = 0;//cài đặt hàm reset
....
resetFunc(); // reset
Ví dụ:
int led = 13;//chân led 13
void setup() {
//khởi tạo serial port
pinMode(led, OUTPUT);
Serial.begin(9600);
delay(200);
}
void(* resetFunc) (void) = 0;//cài đặt hàm reset
void loop() {
delay(10);
digitalWrite(led, HIGH);
Serial.println("bat");
delay(1000);
digitalWrite(led, LOW);
Serial.println("tat");
delay(1000);
Serial.println("resetting");
delay(10);
resetFunc();//tiến hành reset
Serial.println("chay duoc chet lien");
//trong dòng loop sẽ không bao giờ chạy được vì board arduino đa reset
}III. Lời kết
Chúc các bạn tránh bị tình trạng đau đầu khi debug NRF24L01, vì sao? Vì bạn có thể kiểm tra lần cuối cùng nhận được dữ liệu và sau đó gọi hàm reset nếu thời gian cuối nhận được lớn quá một ngưỡng nào đó (Ví dụ 1 phút).
Chúc các bạn thành công!
 .
.