pitagoever gửi vào
- 197678 lượt xem
Kiến thức cơ bản
Xung là các trạng thái cao / thấp (HIGH/LOW) về mức điện áp được lặp đi lặp lại. Đại lượng đặc trưng cho 1 xung PWM (Pulse Width Modulation) bao gồm tần số (frequency) và chu kì xung (duty cycle).
Tần số là gì?
Tần số là số lần lặp lại trong 1 đơn vị thời gian. Đơn vị tần số là Hz, tức là số lần lặp lại dao động trong 1 giây.
Lấy ví dụ, 1Hz = 1 dao động trong 1 giây. 2Hz = 2 dao động trong 1 giây. 16MHz = 16 triệu dao động trong 1 giây.
Như vậy theo quy tắc tam suất: 16 triệu dao động - 1 giây --> 1 dao động tốn 1/16.000.000 (giây) = 0,0625 (micro giây)
Cách xác định 1 dao động như thế nào? Đa phần các bạn mới nghiên cứu điện tử thường mắc sai lầm ở việc xác định 1 dao động. Dao động được xác định từ trạng thái bắt đầu và kết thúc ngay trước khi trạng thái bắt đầu được lặp lại.
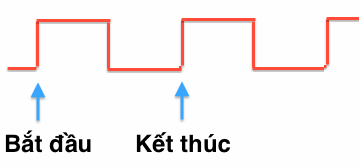
Cách xác định 1 dao động
Như vậy thông thường, 1 dao động sẽ bao gồm 2 trạng thái điện: mức cao (x giây) và mức thấp (y giây). Tỉ lệ phần trăm thời gian giữa 2 trạng thái điện này chính là chu kì xung.
Với x/y = 0% ta có xung chứa toàn bộ điện áp thấp (khái niệm xung nên hiểu mở rộng)
Với x/y = 50% thì 50% thời gian đầu, xung có điện áp cao, 50% sau xung có điện áp thấp.
Với x/y=100% ta có xung chứa toàn bộ điện áp cao.
Tóm lại, với 1 xung ta có:
- Tần số: để tính toán ra được thời gian của 1 xung
- Chu kì xung: bao nhiêu thời gian xung có mức áp cao, bao nhiêu thời gian xung có mức áp thấp.
Liên hệ với Arduino
Với kiến thức cơ bản về xung, các bạn sẽ hiểu rõ hơn về xung trong thực tế như thế nào.
Xung khi sử dụng với hàm analogWrite trong Arduino
Giữa 2 vạch màu xanh lá cây là 1 xung.
| analogWrite | tỉ lệ | chu kì xung |
| analogWrite(0) | 0/255 | 0% |
| analogWrite(64) | 64/255 | 25% |
| analogWrite(127) | 127/255 | 50% |
| analogWrite(191) | 191/255 | 75% |
| analogWrite(255) | 255/255 | 100% |
Hàm analogWrite() trong Arduino giúp việc tạo 1 xung dễ dàng hơn. Hàm này truyền vào tham số cho phép thay đổi chu kì xung, bạn có thể tính toán ra được chu kì xung như ở bảng trên. Tần số xung được Arduino thiết lập mặc định.
Đối với board Arduino Uno, xung trên các chân 3,9,10,11 có tần số là 490Hz, xung trên chân 5,6 có tần số 980Hz. Làm thế nào để tạo ra các xung có tần số nhanh hơn? Bạn có thể tham khảo thêm các thư viện riêng hỗ trợ việc này. Trong mã nguồn Arduino gốc không hỗ trợ phần này.
Lưu ý: xung điều khiển servo có tên gọi PPM (Pulse Position Modulation) khác với xung PWM.

