Tôi yêu Arduino gửi vào
- 46024 lượt xem
Thấy bài viết của bạn Hải Đăng PPK khá hay, cũng nói đến về dự án bật tắt đơn giản nhưng đúng nhu cầu. Mình đã làm thành công, tuy nhiên, mình dùng một cảm biến siêu âm để bơm nước cho cái thùng nước nhà mình. Cảm ơn Hải Đăng PPK nhiều nhiều nhé!
Những hình ảnh về dự án:
Bài viết truyền cảm hứng:



I. Nguyên lý
Mình sẽ đi thẳng vào vấn đề nguyên lý để giúp bạn có cái nhìn rõ ràng luôn. Mình sẽ đặt cảm biến siêu âm ở trên nắp thùng, nó sẽ kiểm tra độ cao tương đối giữa nó và mực nước trong thùng. Nếu nó vượt ngưỡng cao thì ngừng bơm nước (nếu đang bơm nước) và vượt ngưỡng thấp thì bơm nước nếu đang ngưng bơm nước.
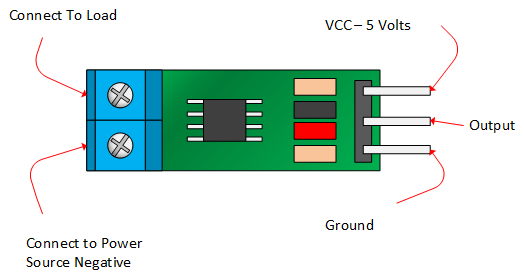
II. Phần cứng
III. Nối mạch
IV. Lập trình
Các bạn nhớ cài thư viện I2C LCD nhé, tìm trên cộng đồng một tí là ra thôi ạ!
//1 Mach Arduino Nano //1 Cam bien khoang cach (HC-SR04) //1 Man hinh lcd 16X2 (su dung i2c lcd) //1 Relay (5 V) //Code chinh sua va viet lai boi Kenny Nguyen (Toi yeu Arduino) #include <Wire.h> #include <LiquidCrystal_I2C.h> #include <SPI.h> #define BACKLIGHT_PIN 13 const int chipSelect = 4; #define trigPin 2 // Chan triger cua cam bien gan vao pin so 3 cua arduino #define echoPin 3 // chan echo cua cam bien gan vao pin so 3 cua arduino #define re1 7 // pin for relay //#define re2 8 #define lenght 16.0 // chieu dai 16 cot cua man hinh double percent = 100.0; unsigned char b; unsigned int peace; int i = 0; uint8_t bar0[8] = { 0x0, 0x0, 0x0, 0x0, 0x0, 0x0, 0x0, 0x0 }; uint8_t bar1[8] = { 0x10, 0x10, 0x10, 0x10, 0x10, 0x10, 0x10, 0x10 }; uint8_t bar2[8] = { 0x18, 0x18, 0x18, 0x18, 0x18, 0x18, 0x18, 0x18 }; uint8_t bar3[8] = { 0x1C, 0x1C, 0x1C, 0x1C, 0x1C, 0x1C, 0x1C, 0x1C }; uint8_t bar4[8] = { 0x1E, 0x1E, 0x1E, 0x1E, 0x1E, 0x1E, 0x1E, 0x1E }; uint8_t bar5[8] = { 0x1F, 0x1F, 0x1F, 0x1F, 0x1F, 0x1F, 0x1F, 0x1F }; LiquidCrystal_I2C lcd(0x27, 16, 2); // thiet lap man hinh dia chi LCD 0x20 cho 16 ki tu va hien thi 2 dong tren man hinh int secs = 0; int secs2 = 0; int mins = -1; int hrs = 0; boolean isAM = true; int milliDivSecs = 1000; int milliDivMins = 60000; int milliDivHrs = 360000; unsigned long prevmillis = 0; int interval = 1000; void setup() { Serial.begin(9600); pinMode(trigPin, OUTPUT); pinMode(echoPin, INPUT); pinMode(re1, OUTPUT); pinMode(13, OUTPUT); while(!Serial); Serial.println("Khoi tao hoan tat"); lcd.init(); // khoi tao man hinh LCD lcd.backlight(); lcd.createChar(0, bar0); lcd.createChar(1, bar1); lcd.createChar(2, bar2); lcd.createChar(3, bar3); lcd.createChar(4, bar4); lcd.createChar(5, bar5); } void loop() { { Serial.print(hrs); Serial.print(" : "); Serial.print(mins); Serial.print(" : "); Serial.print(secs); Serial.print(" , "); } unsigned long currmillis = millis(); long duration, distance; digitalWrite(trigPin, LOW); delayMicroseconds(2); digitalWrite(trigPin, HIGH); delayMicroseconds(10); digitalWrite(trigPin, LOW); duration = pulseIn(echoPin, HIGH); distance = (duration / 2) / 29.1; // thiet lap muc nuoc su dung xuong 30 cm thi tu dong bat relay if (distance >= 30) { digitalWrite (re1, HIGH); digitalWrite (13 , HIGH); Serial.print(" ON "); lcd.setCursor(14, 0); lcd.print("ON"); } // thiet lap muc nuoc len den 10 cm thi tu dong tat relay if (distance < 10) { digitalWrite (re1, LOW); digitalWrite (13, LOW); Serial.print(" OF "); lcd.setCursor(14, 0); lcd.print("OF"); } lcd.setCursor(0, 0); lcd.print(distance); Serial.print(distance); Serial.print(" CM , "); percent = ((30. - distance) / 30.) * 100.; Serial.print(percent); Serial.println(" %"); lcd.print(" CM-"); lcd.print(percent); lcd.print("%"); lcd.setCursor(0, 1); double a = lenght / 100.*percent; if (a >= 1) { for (int i = 1; i < a; i++) { lcd.write(5); b = i; } a = a - b; } peace = a * 5; switch (peace) { case 0: break; case 1: lcd.write(0); break; case 2: lcd.write(1); break; case 3: lcd.write(2); break; case 4: lcd.write(3); break; case 5: lcd.write(4); break; case 6: lcd.write(5); break; } for (int i = 0; i < (lenght - b); i++) { lcd.print(" "); } delay (1000); if(secs == 0) { mins = mins + 1; updateMin(); } secs = (millis() / milliDivSecs) % 60; } void updateMin() { if(mins > 59) { hrs = hrs + 1; updateHrs(); if(hrs == 11 && mins > 59) { } mins = 0; } } void updateHrs() { if(hrs > 12) { hrs = 1; } }V. Kết luận
Chúc các bạn thành công với dự án này! Thật hạnh phúc khi thấy cộng đồng ngày càng phát triển, mình muốn đóng góp một tí, mong các bạn đừng ngại comment nhé!