loc4atnt gửi vào
- 89636 lượt xem
Giới thiệu
Xin chào các bạn. Hôm nay mình sẽ giới thiệu với các bạn một phiên bản arduino khá thú vị. Đó chính là Arduino 101. Chúng ta có thể nói rằng nó chính là phiên bản UNO nâng cấp. Vậy nó nâng cấp những gì chúng ta cùng tìm hiểu.
Tổng quan
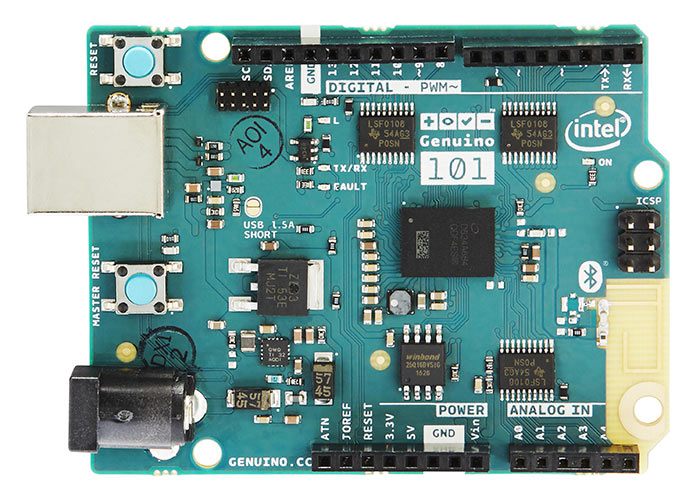
Arduino 101 mang đến hiệu năng và công suất tiêu thụ thấp bởi việc sử dụng vi điều khiển của Intel Curie. Nó được tích hợp Blutooth LE (Chắc giống chức năng của VBLUNO của VNG nhỉ), rất thích hợp cho các dự án giao tiếp với điện thoại thông minh và máy tính. Ngoài Blutooth LE, nó còn được tích hợp thêm cảm biến gia tốc 6 trục/gyro cho phép xây dựng một loạt ứng dụng sử dụng chuyển động. Nếu bạn đã quen thuộc với Uno, phiên bản Arduino 101 là một bước kế tiếp hợp lý và có thêm khả năng thú vị.
Thông số kỹ thuật
Arduino 101 sử dụng vi điều khiển Curie với 2 lõi nhỏ: Một lõi X86 (Quark), một lõi 32bit ARC và chạy ở tốc độ 32 MHZ. Với việc sử dụng 2 lõi nó có thể thực hiện được các nhiệm vụ đòi hỏi khắc khe nhất.
| Vi điều khiển | Intel Curie |
| Điện áp hoạt động | 3.3V (5V ở các chân I / O) |
| Điện áp đầu vào (đề nghị) | 7-12V |
| Điện áp đầu vào (giới hạn) | 7-20V |
| Số I / O Pins | 14 (trong đó có 4 chân PWM) |
| Số I / O PWM Pins | 4 |
| Số pin Ananlog | 6 |
| Dòng điện tại mỗi I / O Pin | 4 mA |
| Bộ nhớ Flash | 196 kB |
| SRAM | 24 kB |
| Tốc độ | 32MHz |
| Tính năng, đặc điểm | Bluetooth LE, gia tốc 6 trục / gyro |
| Chiều dài | 68,6 mm |
| Chiều rộng | 53,4 mm |
Kết luận
Dịch từ: store.arduino.cc