Tôi yêu Arduino gửi vào
- 1730049 lượt xem
Mình thấy có nhiều bạn hỏi về stepper và cách điều khiển nó. Đồng thời thấy vấn đề điều khiển động cơ bước là một vấn đề kinh điển nhưng lại chưa có trên Cộng đồng. Ngoài ra, vì chức năng điểm cộng đồng khá hay và mình cũng muốn có quà nên hôm nay mình sẽ hướng dẫn rất kỹ với các bạn! Thư viện mình dùng là thư viện AccelStepper chứ không phải thư viện stepper mặc định của Arduino nên có thể điều khiển đồng thời nhiều stepper và kết hợp với các thư viện bất đồng bộ khác.
Động cơ bước là gì?
Có rất nhiều tài liệu trên mạng nói về động cơ bước. Bạn có thể google để tìm ra nó. Tuy nhiên, mình xin đề xuất cho các bạn một số tài liệu sau để tham khảo.
Nôm na, động cơ bước là một loại động cơ mà ở đó bạn sẽ có thể quy định chính xác số góc quay và động cơ bước sẽ phải quay. Không giống như Servo, động cơ bước có thể quay bao nhiêu độ tùy ý và mỗi lần quay nó sẽ quay được 1 step, 1 step ở đây là bao nhiêu còn phụ thuộc vào động cơ bước của bạn. Ví dụ, động cơ bước của bạn có 72 step thì nó sẽ cần quay 72 step để hoàn thành một vòng quay. Số step này là hằng số, nhưng bạn có thể dùng công nghệ micro step để "cải thiện" số vòng quay động cơ bước của bạn.
Các thông số động cơ bước
Như mình vừa trình bày, mỗi động cơ bước sẽ có một thống cứng quan trọng nhất mà khi bạn đi đâu và hỏi mua thì phải hỏi đầu tiên. Đó là, động cơ bước này có bao nhiêu step! Theo như mình biết thì động cơ bước trên thị trường Việt Nam mà giới DIY chúng ta hay dùng có số step là 200.
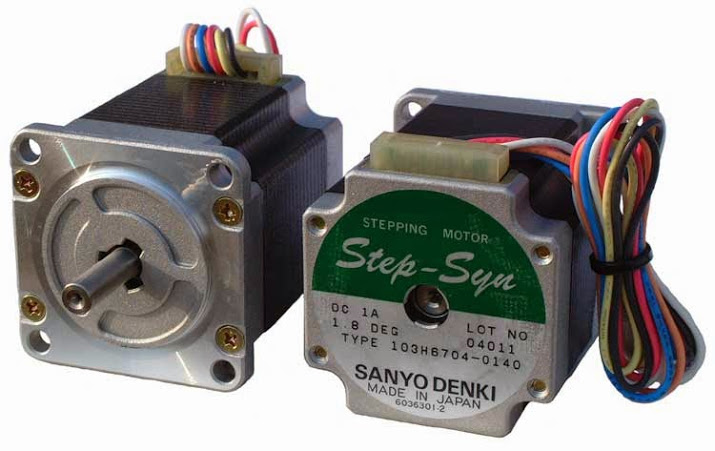
Ngoài ra, nó còn có các thông số khác mà mình sẽ kèm theo ví dụ cụ thể về loại mình dùng:

| Rated Current/phase (dòng tiêu thụ tối đa mỗi pha) | 2.0A |
| Phase Resistance (điện trở từng pha) | 1.4ohms |
| Voltage (hiệu điện thế) | 2.8V |
Trong đó, tham số Rated Current/phase thể hiện dòng điện tối đa mà mỗi pha có thể nhận được, nếu driver điều khiển nào có dòng điện mỗi pha cao hơn thì sẽ hỏng. Nên lựa loại driver cho dòng ra xấp xỉ 80 - 90% thông số này. Điện trở mỗi pha là hằng số (bạn xem trong datasheet của động cơ bước mà bạn mua). Còn con số voltage là hiệu điện thế tối ưu để làm stepper hoạt động ổ định (2.0 * 1.4 = 2.8V)
Phần cứng cần chuẩn bị
- Arduino UNO hoặc mạch Arudino nào cũng được ha.
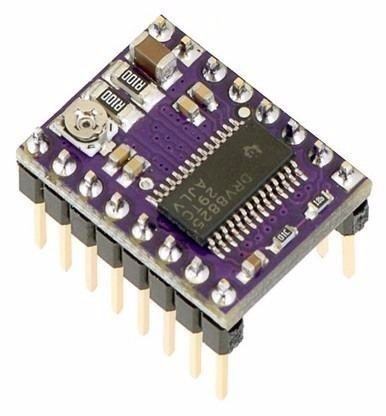
- Driver điều khiển động cơ A4988 hoặc DRV8825.
- Breadboard
- Nguồn cấp 12V (tối thiểu 1A).
- Dây breadboard.
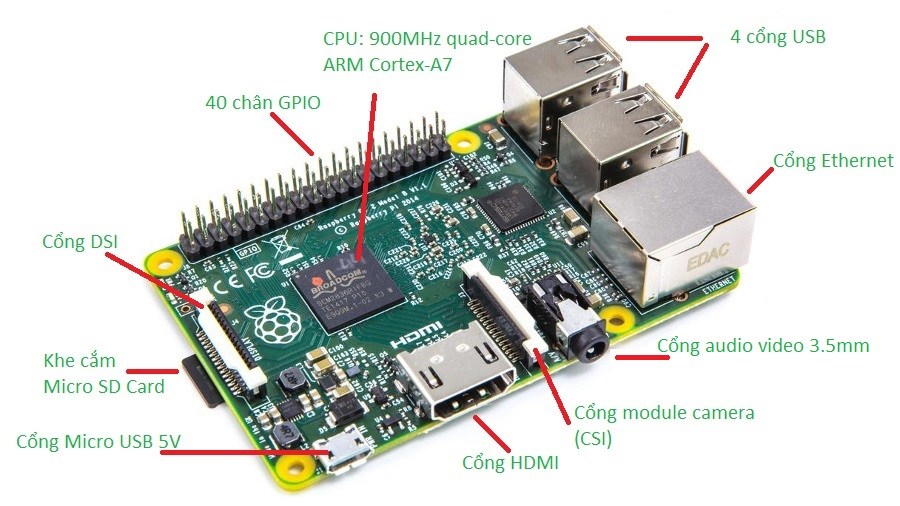
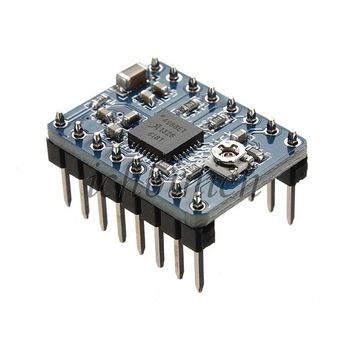
Nối dây driver, động cơ bước và Arduino
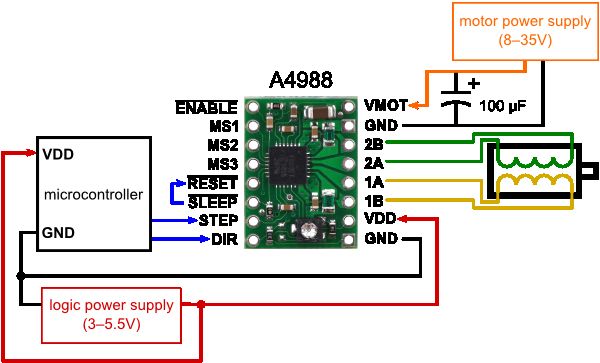
Hình 1
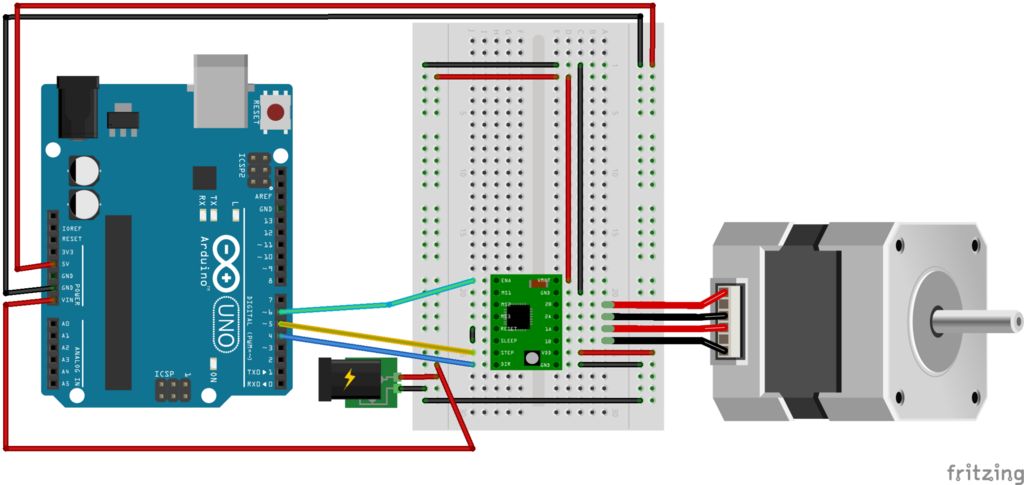
Hình 2

Hình 3
Cái driver sẽ được gắn lên breadboard như hình 3, sau đó bạn nối dây vào như hình 1 và hình 2.
Nạp code cho Arduino
Bạn nạp đoạn code sau cho Arduino.
// Run a A4998 Stepstick from an Arduino UNO.
// Paul Hurley Aug 2015 - http://www.instructables.com/id/Drive-a-Stepper-Motor-with-an-Arduino-and-a-A4988-/
int x;
#define BAUD (9600)
void setup()
{
Serial.begin(BAUD);
pinMode(6,OUTPUT); // Enable pin - chân khởi động - nối vào GND sẽ giúp ta bật động cơ bước, nối vô VCC động cơ bước được thả ra. Nôm na: GND = servo.attach, VCC = servo.detach
pinMode(5,OUTPUT); // Step pin
pinMode(4,OUTPUT); // Dir - pin
digitalWrite(6,LOW); // Set Enable low
}
void loop()
{
digitalWrite(6,LOW); // Đặt Enable ở trạng thái LOW
digitalWrite(4,HIGH); // Đặt Dir ở trạng thái HIGH
Serial.println("Cho chay 200 steps (1 vong)");
for(x = 0; x < 200; x++) // Cho chay 1 vong
{
digitalWrite(5,HIGH); // Output high
delay(10); // chờ
digitalWrite(5,LOW); // Output low
delay(100); // chờ
}
Serial.println("Pause");
delay(1000); // dừng 1 s rồi quay tiếp
}Nhớ gắn điện 12V vô nha
Tăng sức mạnh cho động cơ bước bằng vi bước (micro stepping)
Để bật chức năng này (micro stepping - vi bước), bạn sẽ phải nối ba chân MS1, MS2, MS3 vào VCC!
Nói một cách nôm na, cứ mỗi chân MS1, MS2, MS3 được nối vô VCC, nó sẽ tăng số bước của động cơ bước lên. Nghĩa là thay vì hồi xưa bạn chỉ cần quay 200 bước là đươc một vòng. Bây giờ bạn sẽ phải quay nhiều hơn, lúc đó sẽ có độ chính xác cao hơn!
| MS1 | MS2 | MS3 | Vi bước |
| Không nối | Không nối | Không nối | 1 |
| VCC | Không nối | Không nối | 1/2 |
| Không nối | VCC | Không nối | 1/4 |
| VCC | VCC | Không nối | 1/8 |
| VCC | VCC | VCC | 1/16 |
Thứ nối MS1, MS2, MS3, ta sẽ đươc vi bước 1/16, nghĩa là với động cơ bước có 200 bước thì ta sẽ chia nhỏ mỗi bước ra thành 16 bước => Tổng số bước của động cơ lúc này là 200 * 16 = 3200. Quá đã phải không nào? Thử chạy ví dụ trên, bạn sẽ thấy ngay sự khác biệt. Nhưng lúc này, stepper sẽ hơi nóng, vì vậy, đừng quên tản nhiệt nha!
Điều khiển nhiều động cơ bước với thư viện AccelStepper
Nếu là một người thích sự hoàn hảo thì khi bạn nhìn vào code trên thì sẽ thấy cần rất nhiều dòng code chỉ để làm 1 động cơ bước hoạt động, và với những dòng delay như vậy thì chắc hẳn, bạn sẽ hiểu rằng, chả có cách nào chạy những tiến trình khác khi động cơ bước đang chạy.
Arduino có hỗ trợ sẵn bộ thư viện stepper trong file example. Nhưng nếu bạn đã từng thử thì hẳn biết một điều là, thư viện đó cũng delay như code kia. Nghĩa là trong quá trình động cơ bước hoạt động thì cả chương trình sẽ phải dừng đợi nó hoạt động theo (cơ chế này gọi là cơ chế đồng bộ - sync).
Để điều khiển được nhiều động cơ bước thì chúng ta phải biết ngõ xử lý bất đồng bộ, nghĩa là sao? Nghĩa là phải biết thay hàm delay bằng cách khác, và đó chính là dùng timer, chính là dùng hàm millis(). Và ý tưởng đó đã được thể hiện trong thư viện AccelStepper, thư viện này đã ứng dụng nguyên lý xử lý bất đồng bộ (async) để làm nên nó - một thư viện cực kì hữu ích!
Để tài về thư viện này, các bạn hãy click vào đây (mirror).
Và đây là đoạn code mẫu của thư viện này.
Bạn nhớ nối Enable xuống GND nhé
.
 .
.
#include <AccelStepper.h>
AccelStepper stepper(1,5,4);// pin 5 step, pin 4 dir
void setup() {
Serial.begin(9600);
pinMode(6,OUTPUT); // Enable
digitalWrite(6,LOW); // Dặt Enable xuống low để khởi động động cơ
}
void loop() {
if (stepper.distanceToGo() == 0) //kiểm tra thử động cơ bước có còn đang chạy hay không, nếu không còn chạy thì...
{
delay(1000);
stepper.moveTo(rand() % 400); //chuyển đến tọa độ 0 - 399 (Random)
stepper.setMaxSpeed((rand() % 400) + 200); //chỉnh tốc độ.
stepper.setAcceleration((rand() % 200) + 100); //chỉnh gia tốc.
//kiến thức về tốc độ và gia tốc là kiến thức cơ bản vật lý lớp 10, vì vậy, các bạn lớp 9 trở xuống muốn dùng động cơ bước thì nhớ tìm hiểu khái niệm này nhé. hehe
}
Serial.println(stepper.distanceToGo());
stepper.run(); // phải có hàm này ở hàm loop với mỗi biến stepper thì nói mới chạy được
}
Lời cuối
Chúc các bạn thành công, nếu có dự án gì hay thì hãy chia sẻ với cộng đồng qua phần bài viết truyền cảm hứng nhé. Thấy bài này hay thì cho mình một like và một Rate node động viên để tháng 8 có lúa kỳ 1 nha haha.
Đóng góp từ Cộng đồng
Đóng góp từ bạn Heart về cách tìm thông số động cơ bước khi mất mạc
Trong thời gian làm cái máy cắt rút tỉa dc 1 số điều
Thường trên mạc (nhãn motor) có ghi số Volt , bước/độ (1.8DEG như trên kia) , Ampe và Ohm , nếu mất mạc thì sao :D , nếu chỉ để quay vòng vòng thì bạn ko cần quan tâm cái vụ độ/bước , mình đau đầu nghĩ mãi làm sao biết cái Volt với cái Ampe (Ohm thì có thể đo)
Sau khi đọc kỹ trang chủ của bên làm driver thì có 1 thông tin thú vị là Driver có chỉnh dòng giới hạn , nó chỉ ra nhiêu đó Ampe thôi cho nên thông số Volt gần như vứt đi đối với loại Driver này (i=U/R >> i giảm >> U giảm , 2 thằng này tỉ lệ thuận ) do đó cần nghiên cứu kỹ cái Driver :D
Giờ chỉ còn lại việc mò để set Ampe cho đúng thôi , dựa vào số Ohm đo dc ta nhắm khoãng A mà nó sẽ cần sài , như cái thông số ở trên 2A , 1.4Ohm >> ?A , 5Ohm >>khoãng 500mA , bật lên mà motor ko kêu tiếng lạ , chạy trong thời gian dài ko nóng là ngon rồi , kéo yếu quá tăng A :D , À mà dư quá thì lại nóng :D
À Driver mình có là DRV8825 nhá , bên trang chủ của nó có chỉ rõ cách set luôn


{kind=link}
{kind=link}