ksp gửi vào
- 38914 lượt xem
Nội dung chính, cần nắm
Qua bài viết Bài 2: Attiny13 - Trợ thủ đắc lực của Arduino - Lập trình nó?, chúng ta đã biết được cách lập trình một bé ATTiny13 để làm nhấp nháy một chú đèn LED. Hôm nay, chúng ta sẽ nâng cao một tí nữa, chúng ta sẽ lập trình chú ATTiny13 này để shiftOut ra 8 LED và hơn thế nữa!
Nếu bạn chưa biết về shiftOut, bạn có thể xem bài viết này và thực hiện nó trước!
Phần cứng
- Arduino Uno
- Breadboard
- Dây cắm breadboard
- 8 điện trở 560 Ohm (hoặc 220 Ohm hoặc 1kOhm)
- 8 đèn LED siêu sáng
- 1 ATTiny13
- 1 IC 74HC595
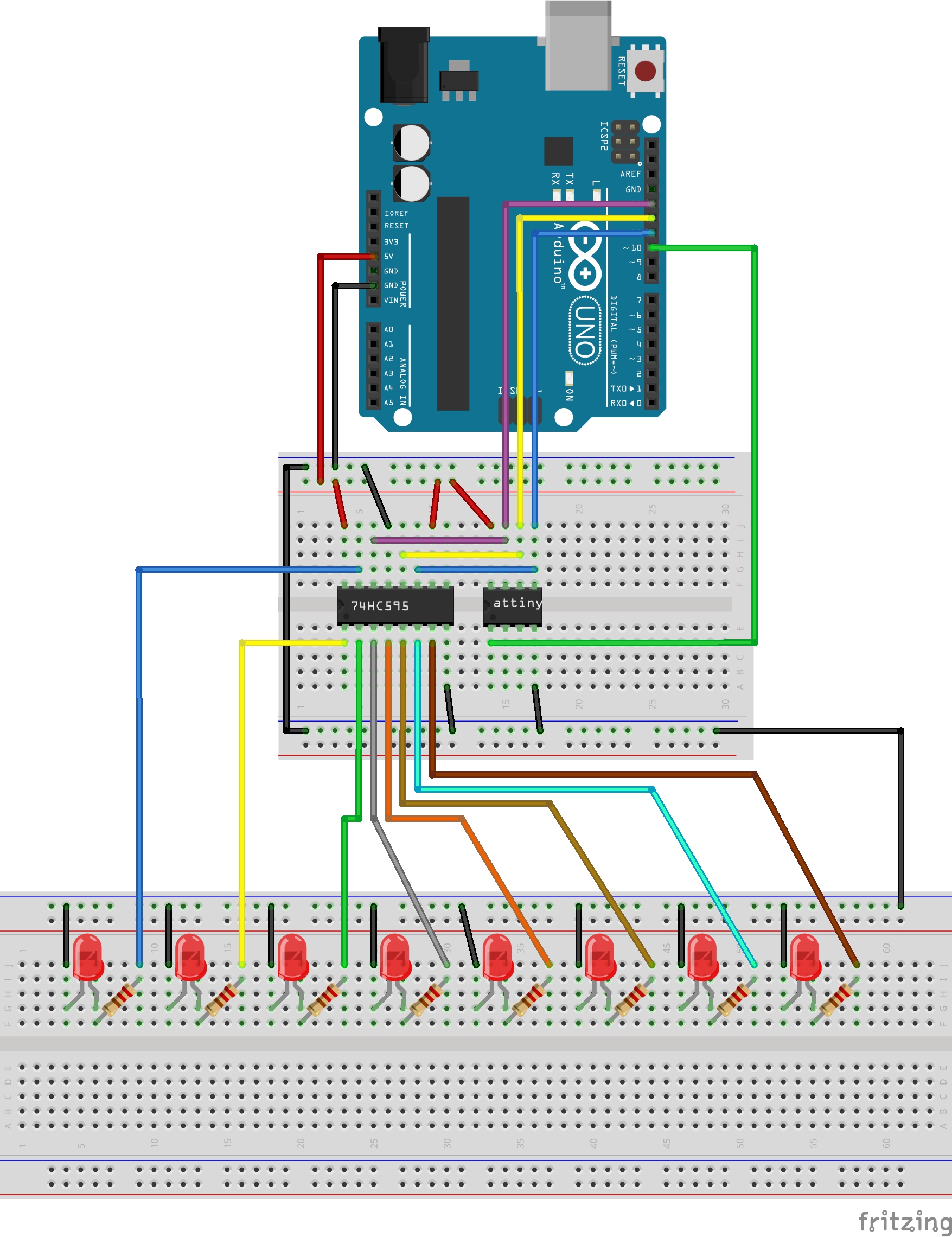
Lắp mạch
Đầu tiên, bạn cần lắp mạch như bài Bài 2: Attiny13 - Trợ thủ đắc lực của Arduino - Lập trình nó? !
Tiếp theo, bạn lắp thêm IC 595 như mạch sau, kích vào hình để xem kích thước thật.
Lập trình
Bạn nhớ chỉnh lại loại mạch là Attiny13 và chỉnh lại Programmer là Program as ISP.
Trước tiên, bạn cần phải nắm một khái niệm về vi điều khiển, đó là xung nhiệp (hoặc tần số của vi điều khiển). Bạn có bao giờ để ý đến "Tần số hoạt động" của mạch Arduino Uno R3 hay là chưa? (Nếu chưa, bạn có thể tham khảo tại đây). Tần số hoạt động có thể hiểu một cách "thoát nghĩa" là một cái đồng hồ của vi điều khiển. Bạn cần nó với một nhiệm vụ cực kỳ đơn giản là tính giờ! Tính giờ đểm làm gì? Để delay đợi đèn sáng đấy :P.
Trong ATTiny13, chúng ta không sử dụng được hàm delay() vì nó chiếm dụng khá nhiều bộ nhớ flash, vì vậy ta sẽ dùng hàm delayMicroseconds(). Mạch Arduino Uno có tần số là 16Mhz, và ATTiny13 chỉ có 9.6 Mhz thôi. Khi xem hướng dẫn delayMicroseconds(), ta thấy mỗi giá trị của hàm này tương đương 1 micro gây (us) bên ngoài đời thực. Vì vậy cứ mỗi giá trị của hàm này trên ATTiny13 sẽ tương ứng với 9.6 / 16 = 0.6 us (nghĩa là cứ 150us thì bằng 1 ms (ngoài đời thực) 150 = 9.6/16 * 1000 / 4 - số này mình thực nghiệm rút kinh nghiệm thôi, các bạn hỗ trợ mình phần này nhé).
Có một điều mà bạn cần biết là: ATTiny13 mặc định lại không bật cái timer (tần số hoạt động) của nó (tuy nó có sẵn một bộ timer bên trong). () bằng cách sử dụng hàm này TCCR0B |= _BV(CS02) ; trong hàm setup(). Để xem kĩ hơn về cách sử dụng của biến TCCR0B, bạn nên vào xem datasheet của ATTiny13 tại trang 73.
Sau đây, bạn hãy upload đoạn code sau để hiểu rõ hơn.
byte latchPin = 1;
byte clockPin = 0;
byte dataPin = 2;
void setup() {
pinMode(latchPin,OUTPUT);
pinMode(clockPin,OUTPUT);
pinMode(dataPin,OUTPUT);
// cài đặt timer
TCCR0B |= _BV(CS02) ;
}
int timer = 150;
void _delay(word time = 1) { // Xây dựng lại hàm delay
for (word i = 1; i<=time;i++) {
delayMicroseconds(timer);
}
}
void _shiftOut(byte dataPin, byte clockPin, byte ledStatus) {
digitalWrite(latchPin, LOW);
shiftOut(dataPin, clockPin, MSBFIRST, ledStatus);
digitalWrite(latchPin, HIGH);
}
void loop() {
byte ledStatus = 0; //trạng thái Led
_shiftOut(dataPin, clockPin, 0);
_delay(100);
for (byte i = 0; i < 8; i++) {
ledStatus = ledStatus << 1 | 1;
_shiftOut(dataPin, clockPin, ledStatus);
_delay(100);
}
}Lời kết
Nước ngọt là thứ không thể thiếu trong quá trình "hack" não! Bạn hãy thoải mái đọc và hiểu một cách từ từ, tớ lúc đầu cũng hơi khó hiểu. Nhưng ngẫm đi ngẫm lại thì có mỗi cái timer là mới thôi. Còn mấy cái kia thì cũng khá ok rồi hehe!


