Đỗ Hữu Toàn gửi vào
- 117806 lượt xem
Tiếp nối chuỗi bài viết của bạn Đinh Hồng Thái về robot dò line...Nhưng vì lý do nào đó, bạn Thái đã ngừng chuỗi bài viết của mình một cách dở dang!!! Hôm nay, mình sẽ hướng dẫn các bạn phần cuối của Series Robot dò line của bạn Đinh Hồng Thái.
Những hình ảnh về dự án:
Bài viết truyền cảm hứng:



I. Giới thiệu
Tiếp nối chuỗi bài viết của bạn Đinh Hồng Thái về robot dò line...Nhưng vì lý do nào đó, bạn Thái đã ngừng chuỗi bài viết của mình một cách dở dang!!! Hôm nay, mình sẽ hướng dẫn các bạn phần cuối của Series Robot dò line của bạn Đinh Hồng Thái.
II. Chuẩn bị
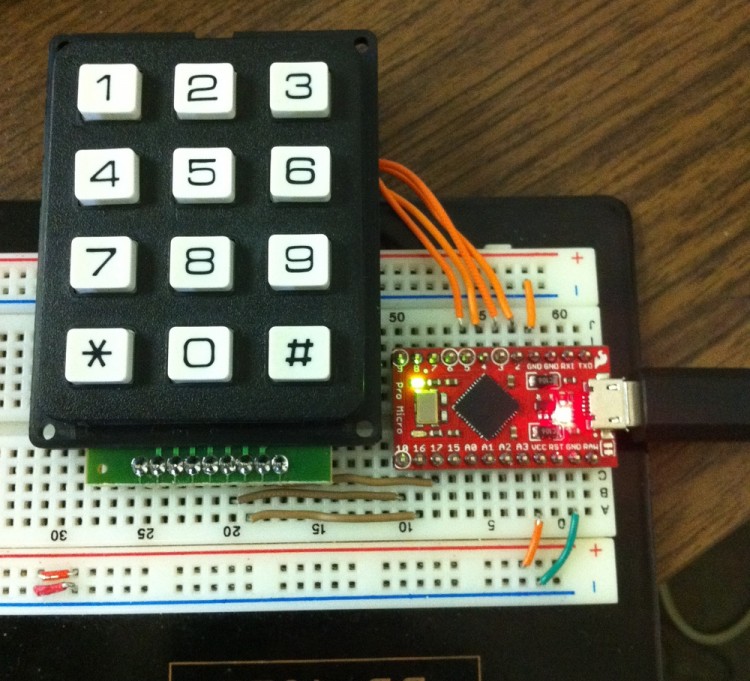
III. Kết nối
- Trước tiên, các bạn kết nối các hồng ngoại với module của nó...Nó có 4 hồng ngoại với các chân tín hiệu lần lượt là IN1, IN2, IN3, IN4
Mạch cầu H, kết nối với các động cơ...Phần các pin của Arduino kết nối với cảm biến thì như sau
IV. Code:
// Định ngĩa các chân điều khiển động cơ #define inA1 2 #define inA2 3 #define inB1 4 #define inB2 5 #define hongngoai1 6 #define hongngoai2 7 #define hongngoai3 8 #define hongngoai4 9 #define ENA 10 #define ENB 11 void setup() { pinMode(inA1, OUTPUT); pinMode(inA2, OUTPUT); pinMode(inB1, OUTPUT); pinMode(inB2, OUTPUT); pinMode(hongngoai1, INPUT); pinMode(hongngoai2, INPUT); pinMode(hongngoai3, INPUT); pinMode(hongngoai4, INPUT); pinMode(ENA, OUTPUT); pinMode(ENB, OUTPUT); Serial.begin(9600) analogWrite(ENA, 120); analogWrite(ENB, 120);//đi chậm cho khỏi trượt Line } void loop(){ benphai = analogRead(hongngoai1)+analogRead(hongngoai2); bentrai = analogRead(hongngoai3)+analogRead(hongngoai4); if (benphai = 0 && bentrai = 0){lui();}//Trượt ra khỏi Line thì lùi lại else {giatrilech = benphai - bentrai} if (giatrilech > 0){ Serial.println("Lệch trái"); quaytrai();//Lệch trái, thỳ quay trái } else if ((giatrilech < 0){ Serial.println("Lệch phải"); quayphai();}//lệch phải thì quay phải else if (giatrilech == 0){ dithang();}//Không lệch đi thẳng } void dithang(){ digitalWrite(inA1,HIGH); digitalWrite(inA2,LOW); digitalWrite(inB1,HIGH); digitalWrite(inB2,LOW); } void lui(){ digitalWrite(inA1,LOW); digitalWrite(inA2,HIGH); digitalWrite(inB1,LOW); digitalWrite(inB2,HIGH); } void quaytrai(){ digitalWrite(inA1,HIGH); digitalWrite(inA2,LOW); digitalWrite(inB1,LOW); digitalWrite(inB2,LOW); } void quayphai(){ digitalWrite(inA1,LOW); digitalWrite(inA2,LOW); digitalWrite(inB1,HIGH); digitalWrite(inB2,LOW); }V. Lời kết
Trên đây là hướng dẫn làm robot dò line...Chúc các bạn thành công!!!