ksp gửi vào
- 61964 lượt xem
Giới thiệu
Hàm analogReference() có nhiệm vụ đặt lại mức (điện áp) tối đa khi đọc tín hiệu analogRead. Ứng dụng như sau, giả sử bạn đọc một tín hiệu dạng analog có hiệu điện thế từ 0-1,1V. Nhưng mà nếu dùng mức điện áp tối đa mặc định của hệ thống (5V) thì khoảng giá trị sẽ ngắn hơn => độ chính xác kém hơn => hàm này ra đời để giải quyết việc đó!
Cú pháp
analogReference(type)
type: một trong các kiểu giá trị sau: DEFAULT, INTERNAL, INTERNAL1V1, INTERNAL2V56, hoặc EXTERNAL
| Kiểu | Nhiệm vụ đảm nhiệm | Ghi chú |
| DEFAULT |
Đặt mức điện áp tối đa là 5V (nếu trên mạch dùng nguồn 5V làm nuôi chính) hoặc là 3,3V (nếu trên mạch dùng nguồn 3,3V làm nguồn nuôi chính) |
|
| INTERNAL |
Đặt lại mức điện áp tối đa là 1,1 V (nếu sử dụng vi điều khiển ATmega328 hoặc ATmega168) |
|
| INTERNAL1V1 | Đặt lại mức điện áp tối đa là 1,1 V | Chỉ có trên Arduino Mega |
| INTERNAL2V56 | Đặt lại mức điện áp tối đa là 2,56 V | Chỉ có trên Arduino Mega |
| EXTERNAL | Đặt lại mức điện áp tối đa BẰNG với mức điện áp được cấp vào chân AREF | Chỉ được cấp vào chân AREF một điện áp nằm trong khoảng 0-5V |
Trả về
không
Cảnh báo
NẾU bạn sử dụng kiểu EXTERNAL cho hàm analogReference thì bạn BUỘC phải cấp nó một nguồn nằm trong khoảng từ 0-5V, và nếu bạn đã cấp một nguồn điện thỏa mãn điều kiện trên vào chân AREF thì bạn BUỘC phải gọi dòng lệnh analogReference(EXTERNAL) trước khi sử dụng analogRead() [NẾU KHÔNG MẠCH BẠN SẼ "die"]
Ngoài ra, bạn có thể sử dụng một điện trở 5kΩ đặt trước chân AREF rồi đặt nguồn điện ngoài (điện áp bạn muốn cấp vào chân AREF). Vì sao lại làm như vậy? Bời vì sao chỗ gắn chân AREF có một nội điện trở (điện trở có sẵn trong mạch) khoảng 32kΩ => sẽ tạo ra mạch giảm áp phiên bản dễ nhất => giảm điện thế gắn vào chân AREF => không hư nếu bạn có lỡ gắn nguồn hơn 5V  . Nếu bạn chưa hiểu rõ, bạn có thể xem hình sau.
. Nếu bạn chưa hiểu rõ, bạn có thể xem hình sau.
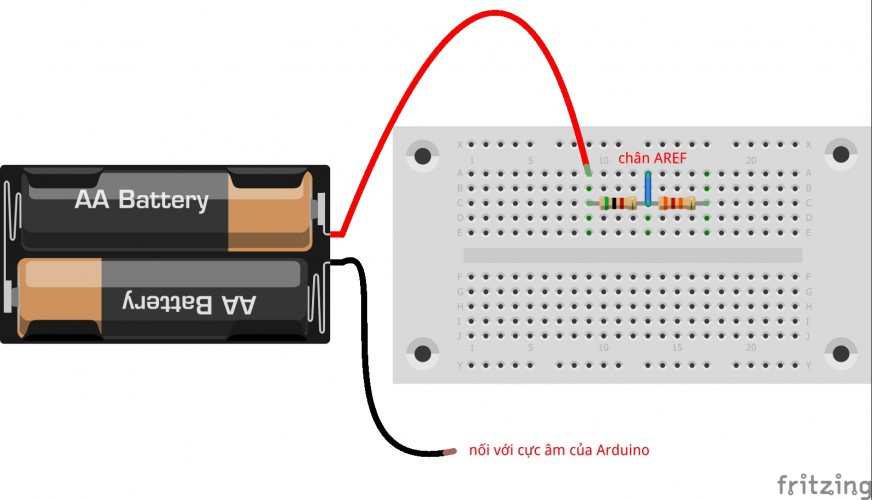
Chân còn lại của điện trở bên phải nối với GND của Arduino bạn nhé! Cảm ơn Thái Sơn đã đóng góp!


