loc4atnt gửi vào
- 56364 lượt xem
Đây là phần 13 của chuỗi bài viết "Lập trình Arduino không cần viết code"
- Xem lại phần 12 tại đây
Ở phần trước, mình đã hướng dẫn các bạn tạo một hàm giúp điều khiển motor dễ dàng hơn, và mục đích của phần đó chính là tạo hàm của phần này. Hôm nay mình sẽ hướng dẫn các bạn tạo hàm điều khiển bộ phận di chuyển sử dụng module L298. Với hàm này bạn có thể ứng dụng nó làm các dự án xe hay robot di chuyển bằng bánh xe sử dụng module L298 để điều khiển.
Cách thức hoạt động
Bộ phận di chuyển của chúng ta sẽ gồm 2 nhánh: nhánh trái và nhánh phải. Mỗi nhánh gồm 1 hoặc 2 motor nối vào 2 chân out của module(2 motor thì mắc song song). Muốn cho bộ phận tiến, lùi thì cho 2 nhánh cùng xoay một chiều. Muốn rẽ thì 2 nhánh xoay ngược chiều nhau. Quá đơn giản phải không :))
Thực hành
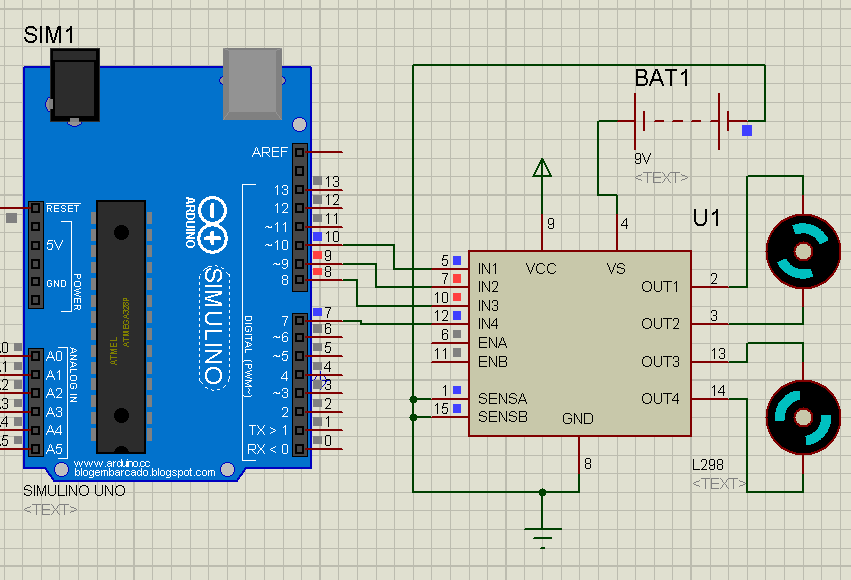
Chuẩn bị
Lắp mạch như sau:
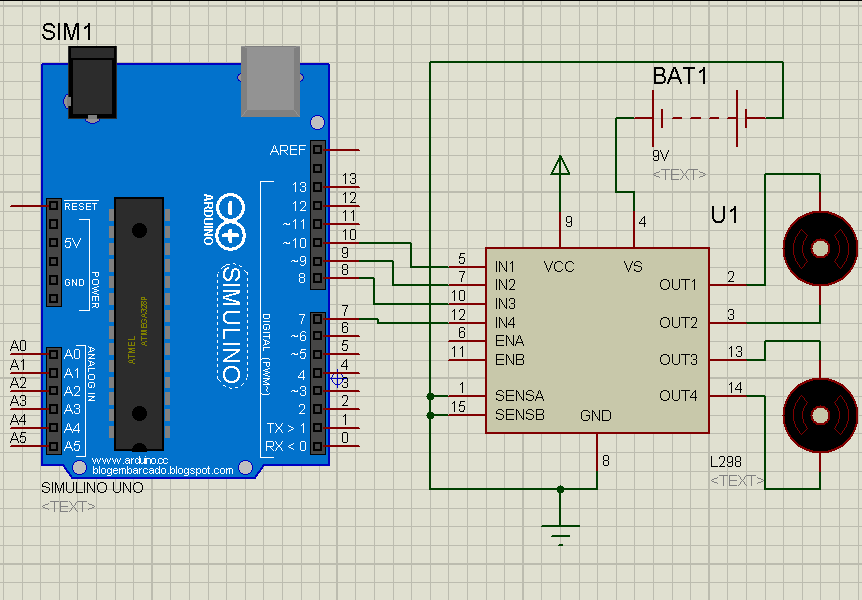
Ok, chú ý: Nên đọc phần 12 trước khi thực hành phần này.
Lập trình với mBlock
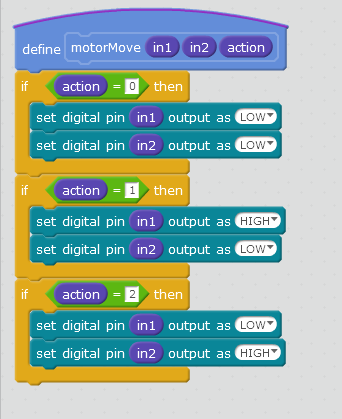
Trước tiên ta tạo một hàm motorMove như phần trước.
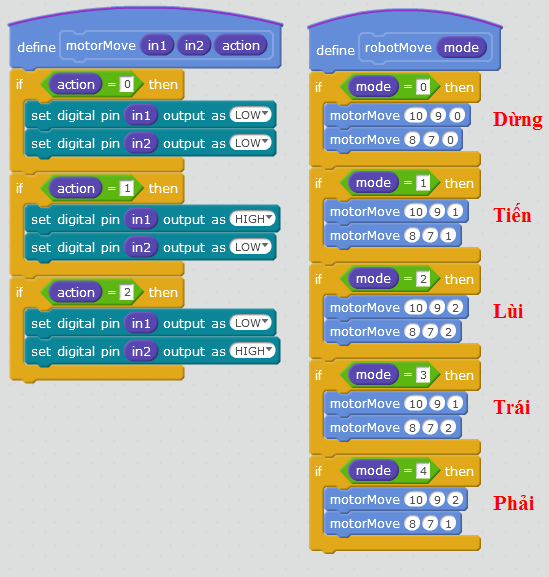
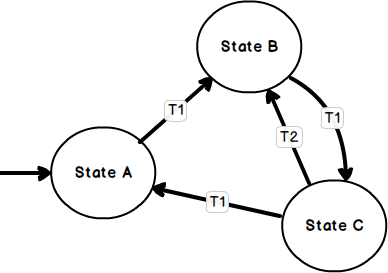
Sau đó tạo một hàm tên robotMove gồm 1 thông số thuộc kiểu số để chỉ chế độ chạy (giá trị của thông số này từ 0 - 4 tương ứng với 5 chế độ chạy như hình):
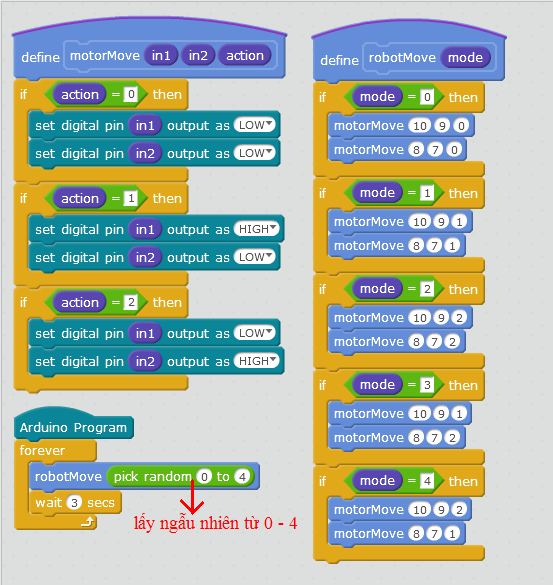
Lập trình chính cho arduino, mình lập trình cho con xe của mình chạy ngẫu nhiên.
Thằng mBlock này thích bị lỗi nên mình phải chỉnh tí.
pinMode lại như hình
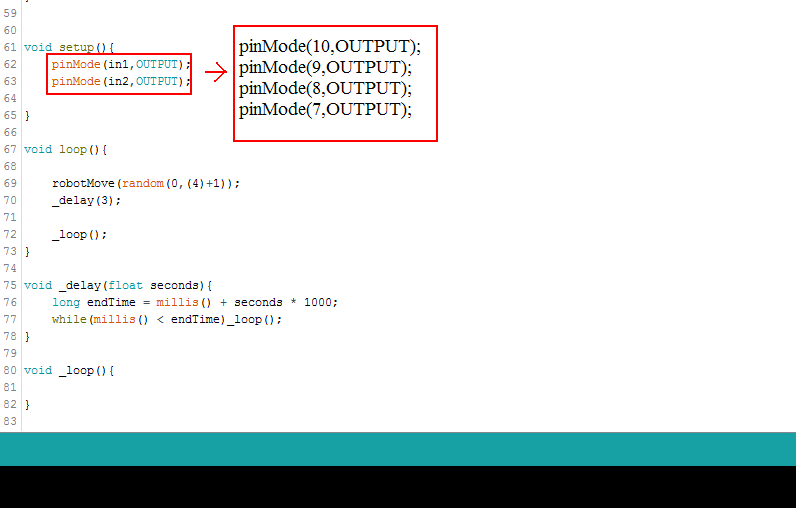
Úp luôn cho nóng :D
Lập trình với Arduino IDE
Code nóng hổi vừa thổi vừa úp nè.
#define inA1 10
#define inA2 9
#define inB1 8
#define inB2 7
void setup()
{
pinMode(inA1,OUTPUT);
pinMode(inA2,OUTPUT);
pinMode(inB1,OUTPUT);
pinMode(inB2,OUTPUT);
}
void loop()
{
robotMove(random(0,5)); //Chay ngau nhien che do tu 0 - 4
delay(3000);
}
void robotMove(int chedo)
{
switch(chedo)
{
case 0: //Dung
motorMove(inA1,inA2,0);
motorMove(inB1,inB2,0);
break;
case 1: //Di thang
motorMove(inA1,inA2,1);
motorMove(inB1,inB2,1);
break;
case 2: //Lui
motorMove(inA1,inA2,2);
motorMove(inB1,inB2,2);
break;
case 3: //Xoay phai
motorMove(inA1,inA2,2);
motorMove(inB1,inB2,1);
break;
case 4: //Xoay trai
motorMove(inA1,inA2,1);
motorMove(inB1,inB2,2);
break;
}
}
void motorMove(int in1,int in2, byte action)
{
switch(action)
{
case 0: //Dung
digitalWrite(in1,0);
digitalWrite(in2,0);
break;
case 1: //Chieu thu 1
digitalWrite(in1,1);
digitalWrite(in2,0);
break;
case 2: //Chieu thu 2
digitalWrite(in1,0);
digitalWrite(in2,1);
break;
}
}Kết luận
Đây chính là con xe khủng của mình :)))))
Chúc các bạn thành công. Cảm ơn đã quan tâm theo dõi.


{kind=link}