ksp gửi vào
- 102380 lượt xem
Giới thiệu và nội dung cần nắm
Trong bài viết này, mục tiêu mà tớ hướng đến là đọc tốc độ của quạt CPU từ đó giải thích cho các bạn về cách thức hoạt động của interrupt (ngắt). Đừng lo lắng khi nghe đến khái niệm interrupt mới mẻ này. Vì khái niệm này rất đơn giản thôi!
Giới thiệu về quạt 12 Vol
Quạt 12 Vol thường có 3 dây (tuy nhiên một số mạch cũ hoặc những loại cực nhỏ thì có 2 dây). Trong đó:
- 1 dây là cực dương (thường là dây đỏ)
- 1 dây là cực âm (màu đen)
- 1 dây là DÂY ĐO TỐC ĐỘ (thường là màu vàng)

Phần cứng
- Arduino Uno
- 1 quạt CPU 12Vol
- Breadboard
- Dây cắm breadboard
- 1 cục pin 9V (pin vuông) hoặc 1 cục acquy 12 Vol (cái này có thì tốt không thì thôi, do bài này chúng ta chủ yếu phân tích về interrupt)
- 1 mũ chụp pin 9v
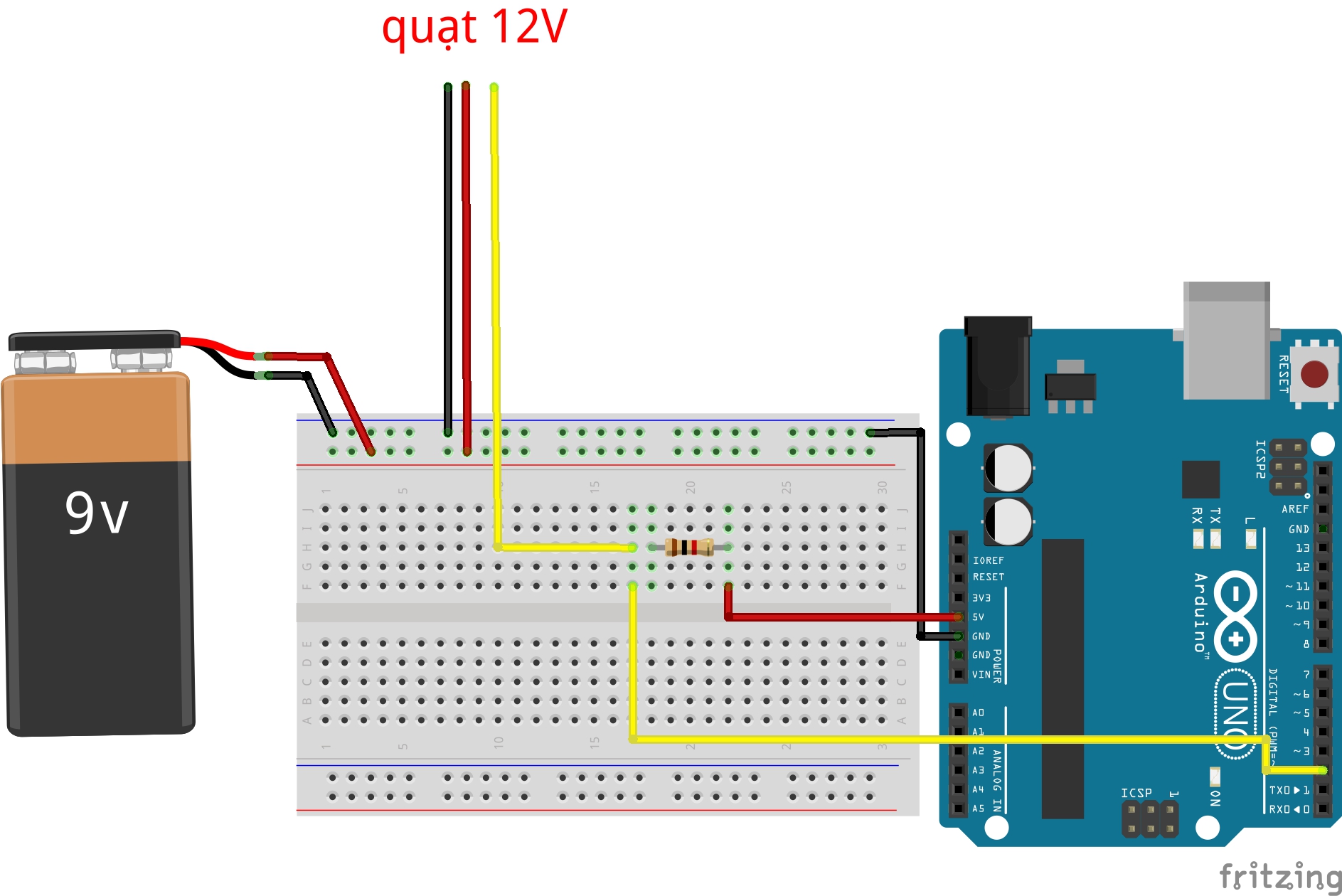
Lắp mạch
Giải thích & lập trình
Để hiểu nó khái niệm về interrupt, bạn hãy tham khảo bài viết này. Tuy nhiên, ở đây như đã giới thiệu ở trên, tôi sẽ mô tả cho bạn hiểu interrupt một cách khác, cách này được tôi nghĩ ra và sử dụng khi mới học về interrupt, cách này có hiệu quả với tôi và tôi nghĩ nó cũng sẽ hiệu quả với bạn.
Interrupt đối với tôi giống như một cái button (cái nút), nhiệm vụ của nó có nhiều điểm giống với digitalRead, nên bạn cứ xem interrupt là một cái nút, không sai đâu. Vì interrupt giống như một cái nút nên nó sẽ cần một chân digital. Có một điều đặc biệt khiến interrupt trở nên "pro" hơn button, đó là nó không bị dừng bởi hàm delay! Kết hợp những điều đó, với Interrupt, bạn có thể làm những ứng dụng thời gian thực hoặc tính toán những thứ CẦN ĐỘ CHÍNH XÁC CAO. Và cứ mỗi lần bắt được một hành động thì nó lại chạy một lệnh ngay tức thì!
Ở ví dụ này, chúng ta dùng interrupt để đọc tốc độ quạt. Vì sao? Bởi vì, cứ quay hết được 1 vòng thì chân tốc độ (thường là màu vàng) của quạt sẽ được nối đến cực âm ⇒ chân interrupt cũng được nối đến cực âm. Ngược lại thì chân interrupt sẽ có mức điện thế cao (do được nối đến nguồn 5V qua điện trở 10k). Vì vậy ta sẽ dùng interrupt để bắt sự kiện (đang ở điện thế cao xuống điện thế thấp - RISING), từ đó đếm được tần số (số sự kiện cao xuống thấp trong 1 giây) của quạt. Sau đó, lấy số ấy đem nhân với 60 (60 giây = 1 phút) để có được tốc độ của quạt (Round per minute - RPM - vòng / phút).
volatile int Hz = 0; //Biến dùng để lưu tần số của quạt. Thanks to pitagoever
int rpm = 0; // Biến dùng để lưu tốc độ quạt
unsigned long lastmillis = 0;
void setup(){
Serial.begin(9600); //Bật Serial để debug chương trình
attachInterrupt(0, rpm_fan, FALLING); // Attach Interrupt ở chân digital 2 (http://arduino.vn/reference/attachinterrupt )
// sự kiện FALLING sẽ xảy ra khi chân digital 2 đang từ cao nhảy xuống thấp
// Và khi có sự kiện FALLING xảy ra thì ta sẽ chạy hàm rpm_fan
}
void loop(){
if (millis() - lastmillis >= 1000){ //Cập nhập trạng thái sau mỗi 1 giây.
noInterrupts();//Tạm dừng mọi Interrupt đang có trên Arduino. http://arduino.vn/reference/nointerrupts
// Bạn có thể đây là dạng delay trên Interrupt
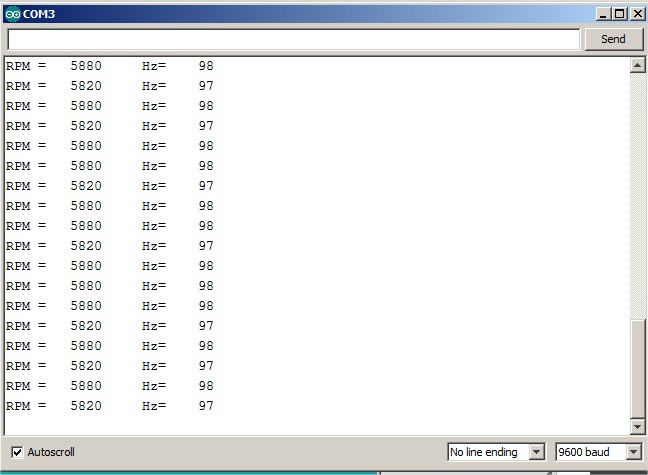
rpm = Hz * 60; // tính tộc độ của quạt
Serial.print("RPM =\t"); //xuất ký tự RPM và một TAB
Serial.print(rpm); // xuất tộc độ quạt
Serial.print("\t Hz=\t"); //xuất 1 TAB rồi ký tự Hz rồi 1 tab
Serial.println(Hz); //xuất tần số của quạt
Hz = 0; // khởi lộng lại bộ đếm tần số
lastmillis = millis(); // cập nhập lại thời điểm cuối cùng ta kiểm tra tốc độ
interrupts(); //Tiếp tục chạy các interrupt
}
}
void rpm_fan(){
Hz++;
}