NDT gửi vào
- 302131 lượt xem
1. Giới thiệu
Servo là một dạng động cơ điện đặc biệt. Không giống như động cơ thông thường cứ cắm điện vào là quay liên tục, servo chỉ quay khi được điều khiển (bằng xung PPM) với góc quay nằm trong khoảng bất kì từ 0o - 180o. Mỗi loại servo có kích thước, khối lượng và cấu tạo khác nhau. Có loại thì nặng chỉ 9g (chủ yếu dùng trên máy bay mô mình), có loại thì sở hữu một momen lực bá đạo (vài chục Newton/m), hoặc có loại thì khỏe và nhông sắc chắc chắn,...
Bạn muốn tự làm app android điều khiển Servo qua Internet?!? Bơi vào xem ngay.
Động cơ servo được thiết kế những hệ thống hồi tiếp vòng kín. Tín hiệu ra của động cơ được nối với một mạch điều khiển. Khi động cơ quay, vận tốc và vị trí sẽ được hồi tiếp về mạch điều khiển này. Nếu có bầt kỳ lý do nào ngăn cản chuyển động quay của động cơ, cơ cấu hồi tiếp sẽ nhận thấy tín hiệu ra chưa đạt được vị trí mong muốn. Mạch điều khiển tiếp tục chỉnh sai lệch cho động cơ đạt được điểm chính xác. Các động cơ servo điều khiển bằng liên lạc vô tuyến được gọi là động cơ servo RC (radio-controlled). Trong thực tế, bản thân động cơ servo không phải được điều khiển bằng vô tuyến, nó chỉ nối với máy thu vô tuyến trên máy bay hay xe hơi. Động cơ servo nhận tín hiệu từ máy thu này.
|
Hình 1: Loại micro servo Tower Pro 9g phổ biến |
Hình 2: Bên trong một micro servo |


2. Lắp mạch
Chuẩn bị
- x1 Micro Servo
- x1 Biến trở
- x1 Arduino Uno
- x1 Breadboard
- x1 Dây cắm breadboard
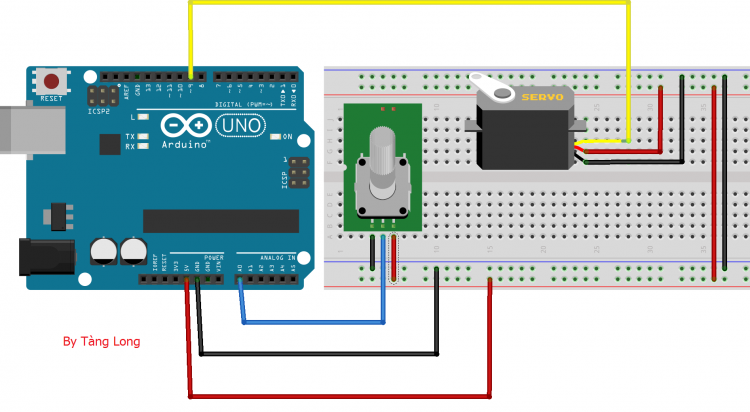
Hình 3: Sơ đồ mạch breadboard
Thư viện Servo đã có sẵn trong hệ thống thư viện mặc định của Arduino nên bạn không cần phải download một thư viện mới về.
Copy và dán code sau
#include <Servo.h> // Thư viện điều khiển servo
// Khai báo đối tượng myservo dùng để điều khiển servo
Servo myservo;
int bientro = A0; // Khai báo chân analog đọc biến trở điều khiển servo
int servoPin = 9; // Khai báo chân điều khiển servo
void setup ()
{
// Cài đặt chức năng điều khiển servo cho chân servoPin
myservo.attach(servoPin);
Serial.begin(9600); // Mở giao tiếp Serial ở baudrate 9600
}
void loop ()
{
int value = analogRead(bientro);// Đọc giá trị biến trở
// Chuyển giá trị analog (0-1023) đọc được từ biến trở sang số đo độ (0-180độ)
// dùng để điều khiển góc quay cho servo
int servoPos = map(value, 0, 1023, 0, 180);
// Cho servo quay một góc là servoPos độ
myservo.write(servoPos);
Serial.println(servoPos);
delay(100);
}3. Kết luận
Bạn hoàn toàn có thể làm rất nhiều thứ với Servo. Theo tớ được biết, Servo được dùng trong dự án kBOT - Wifi Robot đã được tác giả Ngô Huỳnh Ngọc Khánh dùng trong việc điều chỉnh camera, cánh tay robot và radar địa hình. Còn bạn thì sao? Hãy dùng Arduino UNO R3 và Servo làm nên những ứng dụng độc đáo!
Đừng quên một chai nước ngọt khi bí nhé!